
Neste primeiro artigo de nossa série “Mastering Accuracy”, exploraremos os Sistemas Globais de Navegação por Satélites (GNSS) e suas precisões independentes, levando em consideração o GNSS e suas fontes de erro
O que é um sistema GNSS?
Os sistemas de posicionamento baseados em satélite, como o GPS, tornaram-se onipresentes, guiando-nos em nossas viagens de carro e em nossas caminhadas. Eles também desempenham um papel crítico em várias aplicações tão diversas como veículos autônomos, agricultura e levantamento.
No entanto, é importante passar do termo “GPS” para o mais abrangente “GNSS” (Global Navigation Satellite System), que engloba todas as constelações de satélites além do GPS.
Existem quatro constelações globais de satélites em operação (GPS, GLONASS, GALILEO, BEIDOU). Além disso, existem constelações suplementares que atendem regiões locais, como o IRNSS da Índia, ou complementam as globais, como o QZSS do Japão.
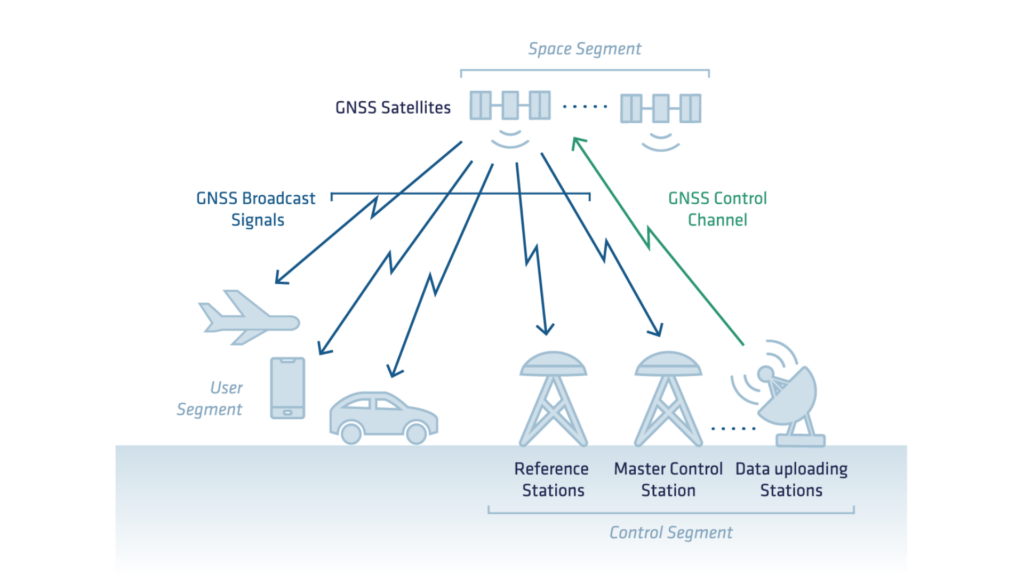
Além dos satélites, um sistema GNSS compreende outros segmentos essenciais:
- O segmento de satélite, que compreende a constelação de satélites.
- O segmento de controle, consistindo em estações de controle terrestre e equipamentos. Estes são responsáveis por monitorar as constelações, determinar a posição dos satélites e garantir sua operação contínua e correta.
- O segmento de usuário, que envolve equipamentos usados para calcular uma posição com base nos sinais recebidos dos satélites.
Princípio fundamental do GNSS: Trilateração
O GNSS determina a posição e o tempo de um receptor por meio de trilateração, usando sinais de vários satélites.
Para calcular uma posição, o sistema deve resolver quatro variáveis: latitude, longitude, altitude e tempo. Este processo requer pelo menos quatro satélites, embora satélites adicionais melhorem a precisão e a confiabilidade.
A imagem a seguir ilustra como funciona a trilateração. Cada satélite define uma esfera ao seu redor, representando as possíveis distâncias até o receptor.
Um segundo satélite restringe as soluções possíveis à interseção dessas duas esferas. Um terceiro satélite refina ainda mais a solução, permitindo que o sistema identifique uma única localização. Em aplicações reais, o sistema também deve levar em conta o tempo, o que exige um quarto satélite.
Sinal emitido pelos satélites
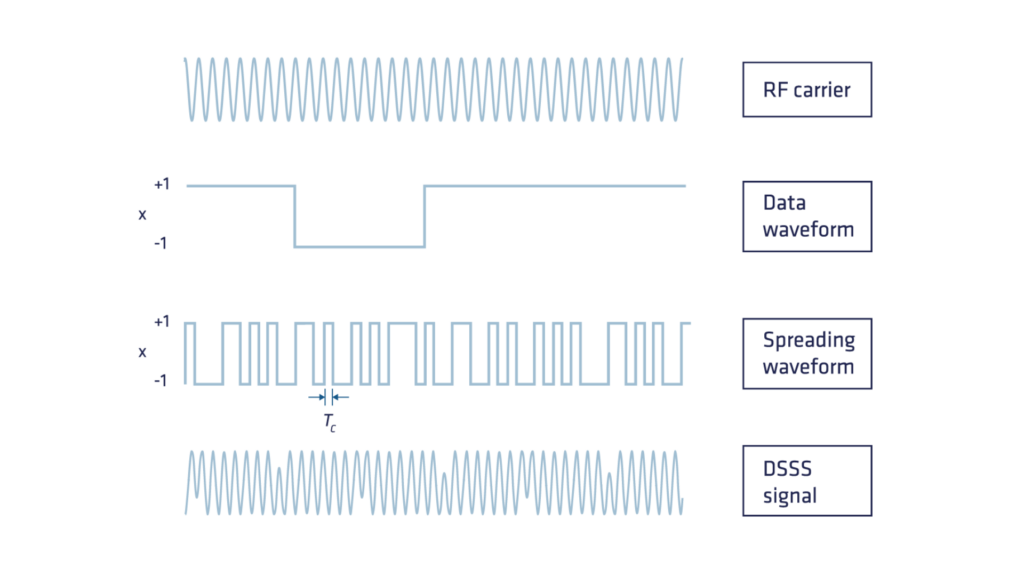
Os satélites GNSS transmitem sinais em várias bandas de frequência, como L1, L2, L5, entre outras. Existem três componentes básicos dos sinais GNSS:
- Dados de navegação (baixa frequência): computados pelo segmento de controle, esses dados incluem informações essenciais, como dados de efemérides (parâmetros orbitais Keplerianos necessários para calcular as posições dos satélites), dados de correção do relógio e informações suplementares. Carregado no satélite e transmitido globalmente para receptores GNSS.
- Código de ruído pseudoaleatório ou código PRN: Cada satélite transmite um código de ruído pseudoaleatório (PRN) único, uma sequência determinística de alta frequência de 0s e 1s projetada com um padrão previsível para que o receptor possa replicá-lo. A principal vantagem de adicionar o código PRN é que ele permite que vários satélites transmitam sinais na mesma frequência simultaneamente e sejam reconhecíveis pelo receptor. Esta técnica, conhecida como Acesso Múltiplo por Divisão de Código (CDMA), atribui a cada satélite um código pseudoaleatório único. Apenas o Glonass usa FDMA (Acesso Múltiplo por Divisão de Frequência), onde cada satélite tem uma frequência ligeiramente diferente.
- Onda portadora de RF: um sinal senoidal originalmente projetado para transportar o sinal combinado de dados de navegação e o código PRN. Veremos mais adiante como este componente evolui para se tornar a base do sinal GNSS, permitindo precisão de posicionamento em nível de centímetro.
Medindo a distância até o satélite: código e fase da portadora
Originalmente, o sistema GPS foi projetado para que o receptor utilize uma réplica do código PRN e técnicas de autocorrelação para calcular a distância satélite-receptor com precisão submetrica. No entanto, a onda portadora, inicialmente destinada à transmissão do código PRN, provou ser um recurso valioso.
A medição da fase da portadora, embora mais precisa, introduziu ambiguidade na determinação da distância entre o satélite e o receptor. Uma exploração mais aprofundada de ambas as medições é apresentada abaixo.
Cálculo do alcance satélite-receptor com código PRN
O receptor GNSS usa um processo chamado “Delay Lock Loop” para determinar o atraso de tempo entre o código transmitido e o código recebido. Este atraso de tempo, que corresponde ao tempo de propagação do sinal, é então convertido em uma distância, multiplicando-o pela velocidade da luz.
No entanto, devido aos relógios não sincronizados do receptor e do satélite, a distância resultante é chamada de pseudodistância. Além do erro de sincronização do relógio, a pseudodistância é afetada por vários outros erros relacionados ao ambiente de propagação (atmosfera, hardware, etc.), que serão discutidos posteriormente no artigo.
Melhoria do alcance satélite-receptor: medição da fase da portadora
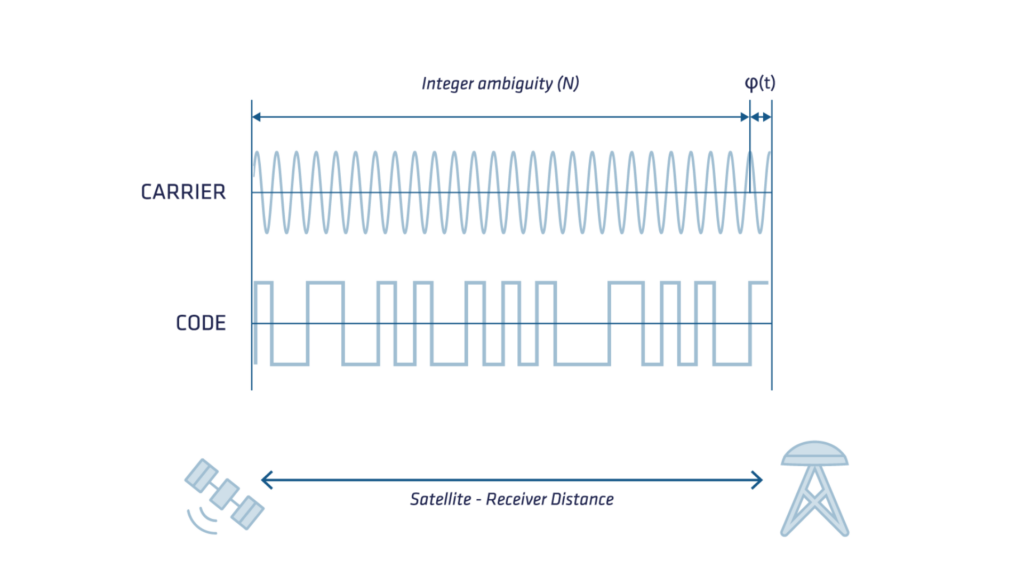
A distância entre o satélite e o receptor também pode ser determinada contando o número de ciclos de fase decorridos entre a emissão e a recepção do sinal e multiplicando-o pelo comprimento de onda da portadora.
Esta medição é duas ordens de magnitude mais precisa do que o código, mas um número inteiro desconhecido constante de ciclos (também conhecido como ambiguidade) afeta sua precisão absoluta. Para determinar a evolução precisa da fase da portadora, o receptor GNSS acumula as mudanças de frequência Doppler na onda portadora, causadas pelo movimento relativo do satélite ao receptor.
Em caso de interrupção do sinal, este processo de acumulação não consegue contabilizar o movimento real e saltos abruptos na medição, também conhecidos como “deslizamentos de ciclo”, podem ser observados.
Lidar corretamente com os deslizamentos de ciclo e a ambiguidade são aspectos desafiadores e essenciais de técnicas de posicionamento preciso, como Real Time Kinematics (RTK) e Precise Point Positioning (PPP).
O diagrama a seguir mostra a onda portadora do sinal, o código e suas respectivas resoluções.
Fontes de erros em GNSS
A precisão inicial geral do GPS para o público (não militar) era de cerca de 100m. Após os vários anos de evoluções (remoção da disponibilidade seletiva, implantação de novas constelações e sistemas SBAS, novos satélites e novas frequências), a precisão do GNSS autônomo está agora entre 5m para receptores GNSS de nível básico, até 1m para os de ponta.
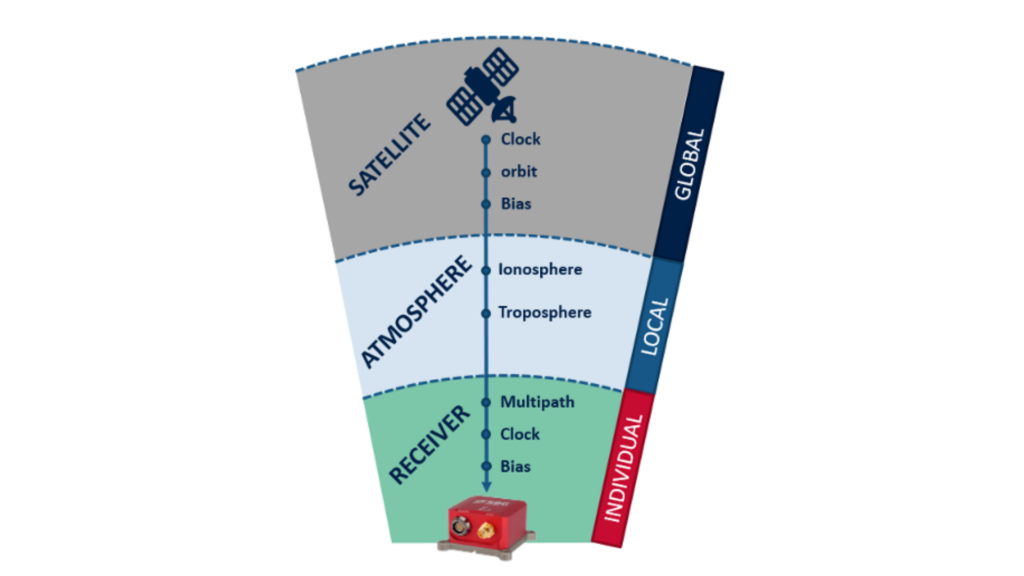
Erros do satélite
- Erros de clock: Embora os relógios atômicos nos satélites GNSS sejam altamente precisos, eles sofrem um pequeno desvio. Infelizmente, mesmo um pequeno desvio no clock do satélite pode levar a uma discrepância substancial na posição calculada pelo receptor. Por exemplo, meros 10 nanossegundos de erro de clock se traduzem em um erro de posição de 3 metros na medição de alcance!
- Erros de órbita: Embora os satélites GNSS sigam órbitas altamente precisas e bem documentadas, essas órbitas sofrem pequenas variações, semelhantes aos relógios dos satélites. Tal como as imprecisões do relógio, mesmo uma ligeira alteração na órbita do satélite pode causar um erro significativo na posição calculada. Erros residuais na órbita persistem, contribuindo para potenciais erros de posição de até ±2,5 metros.
Erros Atmosféricos
- Atraso Ionosférico: Situada entre 50 a 1.000 km acima da Terra, a ionosfera contém íons carregados que afetam a transmissão de sinais de rádio, causando erros de posição (normalmente ±5 metros, maior durante o aumento da atividade ionosférica). O atraso ionosférico varia com a atividade solar, hora do dia, estação e localização, tornando as previsões desafiadoras.
- Atraso Troposférico: A camada atmosférica imediata da Terra, a troposfera, apresenta variações no atraso devido a mudanças na umidade, temperatura e pressão atmosférica.
Erros do receptor
O relógio interno do receptor, que é menos preciso quando comparado ao relógio atômico do satélite, juntamente com outros erros de hardware e software, adiciona ruído e viés às medições.
| Atraso | Origem | Magnitude |
|---|---|---|
| Erro de Posição | Satélite | 5m |
| Clock Offser | Satélite | 0-300 km |
| Atraso Instrumental | Satélite | 1-10 m |
| Efeito Relativístico | Satélite | 10 m |
| Atraso Ionosférico | Percurso (50-1000 km) | 2-50 m |
| Atraso Troposférico | Percurso (0-12 km) | 2-10 m |
| Atraso Instrumental | Receptor | 1-10 m |
| Clock Offset | Receptor | 0-300 km |
Para garantir uma navegação otimizada, o sistema deve levar em conta esses erros, mitigá-los usando um modelo de erro específico ou estimá-los por meio do filtro de navegação.
O cálculo da posição também deve considerar muitos outros termos de erro não listados neste artigo, como efeitos de maré e efeitos relativísticos.
Várias fontes de erro influenciam o desempenho da tecnologia GNSS, que fornece posicionamento, navegação e tempo de alta precisão.
Fatores como atrasos atmosféricos, erros de relógio e efemérides de satélite, interferência de multicaminhos e ruído do receptor podem degradar a precisão. Embora as técnicas de correção modernas (GNSS diferencial, RTK e PPP) ajudem a mitigar o GNSS e suas fontes de erro, entender suas origens permanece essencial para otimizar o desempenho do GNSS.
À medida que os avanços no processamento de sinais, na fusão de sensores e no aprendizado de máquina continuam a evoluir, os sistemas GNSS se tornarão ainda mais robustos, garantindo maior confiabilidade em diversas aplicações.