Engenharia de veículos autônomos: navegação da Zurich UAS Racing com Ellipse-D
A Zurich UAS Racing resolveu desafios críticos de desvio de posição que antes impossibilitavam a operação autônoma para eles. Esse avanço na engenharia de veículos autônomos agora permite que a equipe inicie sua jornada rumo à disciplina de autocross na famosa competição Formula Student.
O Ellipse-D nos permite obter uma posição absoluta do nosso carro na pista. Uma posição precisa é essencial para a operação do nosso sistema autônomo. Um dos nossos maiores problemas tem sido o desvio de posição ao longo do tempo. Com o Ellipse-D, poderemos enfrentar a disciplina de autocross, o que antes era impossível para nós. | Finn Scheller, C-Leader da Zurich UAS Racing Team.

A experiência da equipe em engenharia de veículos autônomos
A Zurich UAS Racing (ZUR) é uma equipe apaixonada da Formula Student da Universidade de Ciências Aplicadas de Zurique em Winterthur, Suíça. Fundada em 2019, esta ambiciosa associação estudantil compete na maior competição de engenharia do mundo, Formula Student, construindo carros elétricos e autônomos para competir contra universidades de todo o mundo.

A equipe cresceu para mais de 70 estudantes motivados de vários programas de graduação, todos unidos por seu objetivo de otimizar o desempenho nas corridas e promover a engenharia de veículos autônomos.
Formula Student
A competição Formula Student, de grande prestígio internacional, desafia equipes de estudantes a projetar e construir carros de corrida de fórmula, competindo em várias disciplinas, incluindo projeto de engenharia, análise de custos e eventos dinâmicos em pista.

O carro: ZUR04
A jornada da ZUR começou com seu primeiro carro funcional em 2021, participando com sucesso de eventos de veículos elétricos (EV) desde 2022. Seu carro de corrida autônomo, ZUR04, representa o auge da engenharia de veículos autônomos estudantil, com quatro motores elétricos nas rodas produzindo 140 kW de potência total, permitindo uma aceleração de 0 a 100 km/h em apenas 2,5 segundos.
O veículo é projetado para corridas com e sem motorista, com desempenho comparável ao de carros de corrida profissionais. Seu sistema autônomo está atualmente em fase de testes.
Requisitos técnicos da Zurich UAS Racing
A ZUR precisava de um Sistema de Navegação Inercial (INS) avançado que pudesse se integrar perfeitamente ao seu sistema de corrida autônomo, atendendo aos requisitos exigentes de uma competição de alta velocidade.
O principal desafio era alcançar um posicionamento confiável no ambiente dinâmico das corridas, onde os sistemas de localização tradicionais geralmente falham devido ao desvio de posição ao longo do tempo.
O sistema tinha que fornecer precisão de posição absoluta, essencial para a operação do sistema autônomo, principalmente para a desafiadora disciplina de autocross, que exige navegação precisa através de arranjos complexos de cones.
Portanto, em resumo, estas foram as questões críticas:
- Desvio de posição: desvio significativo ao longo do tempo, impedindo a localização precisa.
- Limitação de autocross: impossibilitado de competir na disciplina de autocross devido a problemas de posicionamento.
- Insights de dados limitados: dados insuficientes de dinâmica do veículo para otimização de software.

E estes foram os requisitos principais:
- Localização precisa: Necessidade de posição absoluta na pista.
- Integração ROS: Integração perfeita com o sistema autônomo baseado em ROS existente.
- Solução compacta: Unidade leve com boa relação potência-peso.
- Documentação aberta: Recursos técnicos de fácil acesso.
- Alta dinâmica: Capacidade de lidar com condições extremas de corrida.
Após avaliar o cenário da ZUR, recomendamos nosso Ellipse-D, um sistema de navegação inercial (INS) projetado especificamente para aplicações exigentes onde precisão e confiabilidade são fundamentais.
Nossa solução para corridas autônomas: Ellipse-D
O Ellipse-D é o menor sistema GNSS/INS RTK de dupla antena, fornecendo posicionamento em nível de centímetro e direção precisa para aplicações dinâmicas de corrida.
Esta tecnologia representa um avanço significativo em soluções de engenharia de veículos autônomos, oferecendo à equipe:
- Alta precisão: Precisão de posicionamento em nível de centímetro, essencial para navegação precisa na pista e prevenção de obstáculos em corridas autônomas.
- Direção com duas antenas: Desempenho superior em ambientes desafiadores onde a interferência magnética de motores elétricos e sistemas eletrônicos comprometeria os sistemas tradicionais baseados em bússola.
- Conformidade com corridas: Design compacto e construção robusta, ideais para aplicações de corrida de alta dinâmica, com excepcional manuseio de vibração e resistência à temperatura.

Finalmente, o quarto ponto essencial para a aspiração da ZUR foi a integração ROS que, em suas próprias palavras, combinada com os outros recursos, tornou todo o pacote a solução mais econômica disponível no mercado:
“O principal argumento de venda para nós foi a documentação de código aberto e a biblioteca de interface. O suporte total através do ROS também é uma grande vantagem para nós, pois nosso carro já executa o ROS. Portanto, a integração foi fácil. Também apreciamos o suporte da SBG System à nossa equipe para melhorar nosso desempenho graças aos seus produtos. Comparado com outros fornecedores de tais produtos, a SBG Systems nos ofereceu o melhor custo-benefício”, enfatiza Scheller.
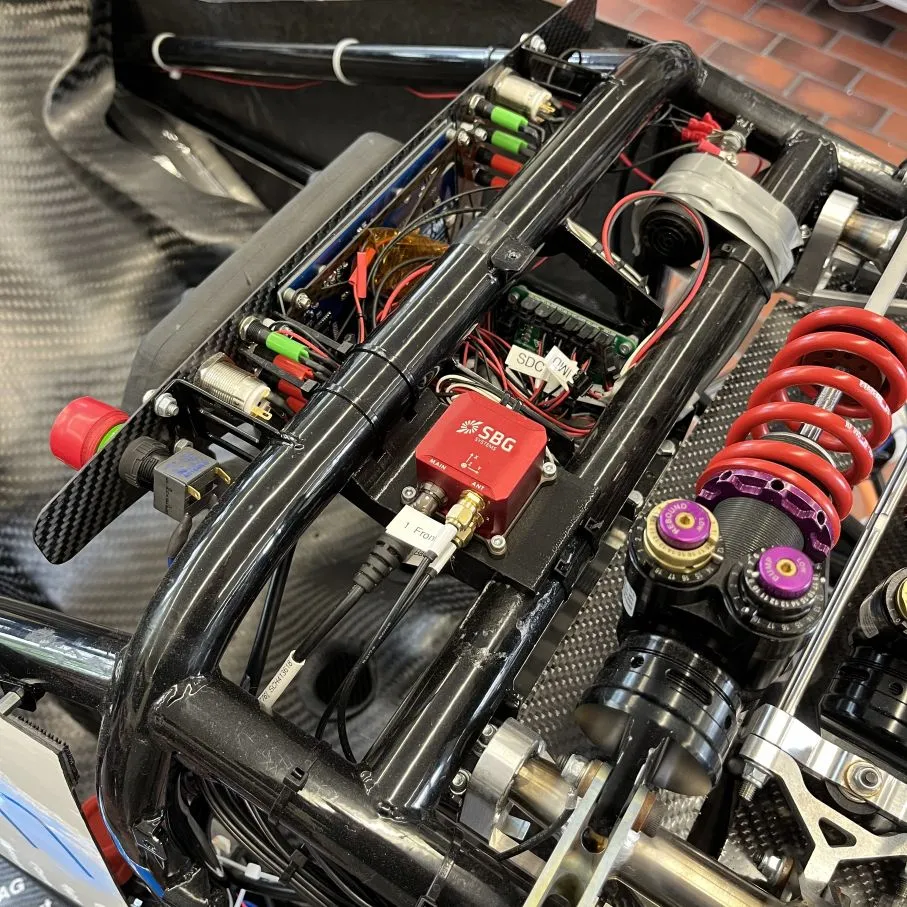
Integração e desempenho avançados
O processo de integração demonstrou a versatilidade do Ellipse-D e a eficácia da abordagem de suporte da SBG Systems. Conectado a uma plataforma de computação RaspberryPi e NVIDIA Jetson, o sistema utiliza a biblioteca sbgECom e o pacote ROS2 para acesso e processamento abrangentes de dados.
Essa arquitetura permite a distribuição de dados de navegação em tempo real em todo o sistema autônomo, mantendo a flexibilidade necessária para o desenvolvimento de algoritmos personalizados.
A equipe também está aproveitando os recursos do Ellipse-D para desenvolver algoritmos avançados de vetorização de torque que utilizam os dados do INS. Eles também construíram um rover baseado em GNSS RTK e uma estação base para fornecer ground truth de trilha preciso.
Além de integrar o INS em seu carro autônomo ZUR04, com testes de pista programados para este verão, a equipe incorporou o INS em seu carro de corrida recém-construído, o ZUR05. O Ellipse-D também será um componente chave no veículo autônomo da próxima temporada, o ZUR06.
As três principais escolhas da Zurich UAS Racing
A ZUR enfatizou três aspectos notáveis que eles apreciam ao trabalhar com a SBG Systems.
- Código aberto: Primeiramente, eles apreciaram a abordagem de código aberto que se alinha com sua missão educacional e metodologia de desenvolvimento. A documentação transparente e as bibliotecas de interface permitem que os alunos entendam e modifiquem o sistema de acordo com suas necessidades específicas, proporcionando oportunidades de aprendizado inestimáveis em engenharia de veículos autônomos.
- Excelente documentação: A equipe valorizou a documentação abrangente e abertamente disponível do produto, que agilizou seu processo de integração. Ao contrário de muitos sistemas comerciais que fornecem detalhes técnicos limitados, a abordagem da SBG Systems permitiu uma rápida compreensão e implementação.
- Boa comunicação: Por fim, eles destacaram a excelente comunicação e suporte, observando que sempre se sentiram ouvidos e receberam respostas para todas as suas perguntas. Este suporte responsivo provou ser crucial para uma equipe de estudantes trabalhando dentro de prazos de competição apertados.
Conclusão
A implementação resolveu o desafio mais crítico da ZUR: o desvio de posição que anteriormente os impedia de competir na disciplina de autocross. Com a precisão em nível de centímetro do Ellipse-D e a determinação de direção por antena dupla, a equipe agora pode iniciar as corridas de teste com o objetivo de competir sem motorista na próxima temporada (verão de 2026) com seu carro de corrida de próxima geração.

Esta colaboração exemplifica o poder das parcerias indústria-educação no avanço da tecnologia de veículos autônomos.
“O Ellipse é o ponto de entrada perfeito para sistemas INS. No futuro, planejamos usar sistemas mais poderosos em conjunto com nosso sistema de veículo baseado em Ethernet recém-desenvolvido”, conclui Scheller.
Nosso compromisso de apoiar equipes de estudantes como a ZUR demonstra como fornecer acesso à tecnologia de navegação de nível profissional permite que a próxima geração de engenheiros ultrapasse os limites do que é possível em corridas autônomas.
Ellipse-D
O Ellipse-D é um sistema de navegação inercial auxiliado por GNSS, compacto e de alto desempenho, que fornece medições confiáveis de orientação, posição e heave.
Ele combina uma IMU com um receptor GNSS de banda dupla e usa algoritmos de fusão de sensores para fornecer posicionamento preciso em ambientes desafiadores.
Ele oferece capacidade de antena dupla para heading preciso em condições estáticas.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Como funcionam os carros autônomos?
Carros autônomos são veículos equipados com sistemas sofisticados que lhes permitem navegar e se controlar sem intervenção humana. Esses veículos usam uma combinação de sensores de direção autônoma e algoritmos para perceber seu ambiente, tomar decisões e executar tarefas de direção autônoma. O objetivo é alcançar a autonomia total, onde o veículo pode lidar com todos os aspectos da direção com segurança e eficiência.
Carros autônomos dependem de uma variedade de tecnologias-chave para perceber o ambiente ao seu redor. Estas incluem:
- GNSS (Sistema Global de Navegação por Satélite): para obter atualizações em tempo real sobre a posição, velocidade e direção do carro autônomo.
- INS (Sistemas de Navegação Inercial): para manter a precisão em caso de interrupções do sinal GNSS. Ele fornece atualizações em tempo real sobre a posição, velocidade e direção do carro autônomo.
- LiDAR (Light Detection and Ranging): uso de feixes de laser para criar um mapa 3D detalhado do ambiente do veículo. Essa tecnologia ajuda o carro a detectar e medir objetos ao seu redor, incluindo outros veículos, pedestres e placas de trânsito.
- Radar (Radio Detection and Ranging): uso de ondas de rádio para detectar a velocidade, distância e direção de objetos. O radar é particularmente útil em condições climáticas adversas e para detectar objetos em alcances mais longos.
- Câmeras: para capturar informações visuais sobre o ambiente do veículo, incluindo marcações de faixa, sinais de trânsito e placas de sinalização. São essenciais para interpretar sinais visuais complexos e tomar decisões com base em dados visuais.
Quais são os 6 graus de automação em veículos?
Os 6 níveis de carros autônomos, definidos pela Society of Automotive Engineers (SAE) em seu padrão J3016, descrevem os graus de automação em veículos. Aqui está uma análise:
- Nível 0: sem automação. Avisos ou assistência momentânea, como frenagem automática de emergência ou avisos de ponto cego, mas sem automação sustentada.
- Nível 1: assistência ao motorista. Sistema automatizado único para suporte, como controle de cruzeiro adaptativo (mantendo velocidade e distância) ou assistência de manutenção de faixa.
- Nível 2: automação parcial. Combinação de sistemas, como direção e aceleração/desaceleração, mas sem tomada de decisão.
- Nível 3: automação condicional. O carro lida com a maioria das tarefas de direção em condições específicas (por exemplo, direção em rodovia). O sistema pode monitorar o ambiente.
- Nível 4: alta automação. O carro opera de forma independente em cenários predefinidos. Nenhuma atenção do motorista é necessária nessas áreas.
- Nível 5: automação total. O veículo pode executar todas as tarefas em todos os ambientes que um motorista humano poderia lidar. Nenhum volante ou pedais podem estar presentes.
Esses níveis ilustram a progressão de veículos controlados por humanos para sistemas totalmente autônomos capazes de lidar com todas as tarefas de direção.
O INS aceita entradas de sensores auxiliares externos?
Os Sistemas de Navegação Inercial da nossa empresa aceitam entradas de sensores auxiliares externos, como sensores de dados aéreos, magnetômetros, odômetros, DVL e outros.
Essa integração torna o INS altamente versátil e confiável, especialmente em ambientes com GNSS negado.
Esses sensores externos aprimoram o desempenho geral e a precisão do INS, fornecendo dados complementares.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU (unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre roll, pitch, yaw e movimento, mas não calcula dados de posição ou navegação. A IMU é projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo para determinar a posição ou velocidade.
Por outro lado, um INS (sistema de navegação inercial) combina dados da IMU com algoritmos avançados para calcular a posição, velocidade e orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação como a filtragem de Kalman para fusão e integração de sensores. Um INS fornece dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos como o GNSS.
Este sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes com GNSS negado, como UAVs militares, navios e submarinos.
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não só fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.