
Em um cenário cotidiano, a precisão do Sistema Global de Navegação por Satélite (GNSS) autônomo é mais do que suficiente para ajudar alguém a encontrar o caminho, mas muitas aplicações exigem uma precisão maior. Muitas tecnologias de correções diferenciais foram desenvolvidas para melhorar a precisão do GNSS para até 1cm, permitindo uma ampla gama de novas aplicações.
Alcançar tal precisão requer atenção ao sistema de referência usado para cálculos e resultados de posicionamento, um tópico abordado em Geodésia e Transformações de Datum, que está além do escopo deste artigo.
Correções GNSS
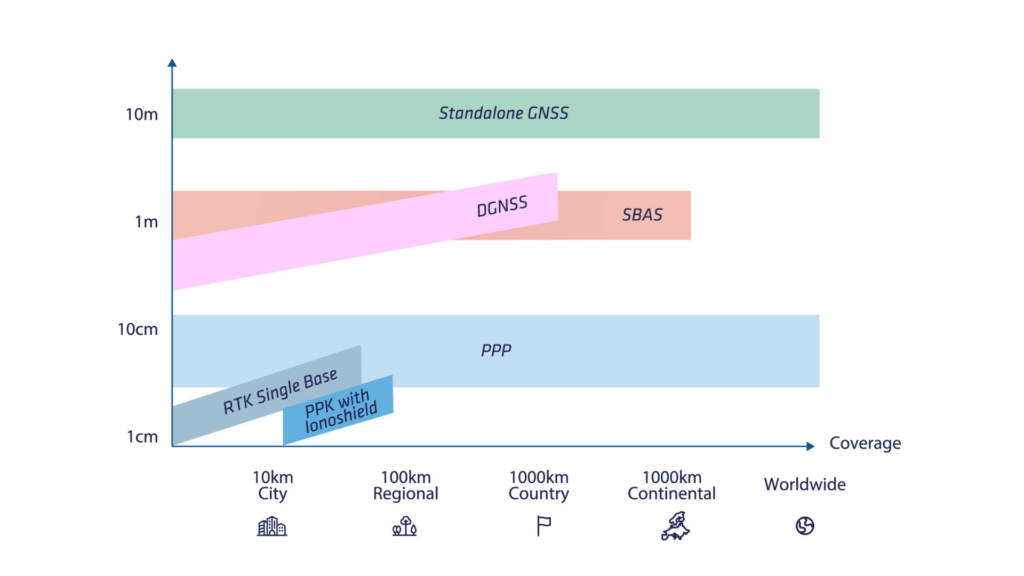
Melhorar a precisão do GNSS depende da correção de vários erros.
Existem muitos tipos de correções que fornecem diferentes níveis de cobertura e desempenho.
Os principais estão detalhados na tabela abaixo. Neste artigo, abordaremos o básico das correções mais comuns: uma breve explicação de DGNSS, seguida de explicações detalhadas de SBAS e RTK; e descreveremos os benefícios do PPK.
O próximo artigo desta série examinará mais de perto o Ionoshield e o PPP em mais detalhes.
GNSS Diferencial (DGNSS)
O DGNSS baseado em código tradicional faz uma suposição simples: os erros de satélite e os erros atmosféricos locais são considerados os mesmos em pequenas áreas. Um par de receptores GPS pode então ser usado para cancelar os erros atmosféricos (ionosféricos e troposféricos) e de satélite, melhorando assim o desempenho da navegação.
Nesse modo de operação, um receptor GNSS de estação base é instalado a poucos quilômetros do alcance operacional do receptor GNSS do rover. A estação base transmite um conjunto de correções para o receptor do rover usando um modem RF ou GSM. O receptor do rover pode então usar essas correções para calcular uma posição diferencial (em relação à estação base).
Essa técnica pode melhorar a precisão da navegação para o nível sub-metro, mas agora está obsoleta, pois o RTK se tornou o padrão para o posicionamento de alta precisão.
SBAS (Sistema de Aumentação Baseado em Satélite)
O SBAS foi desenvolvido para permitir a navegação segura de aeronaves civis. Desde então, tem sido usado para muitas outras aplicações de usuário final que exigem maior precisão do que um receptor GNSS autônomo.
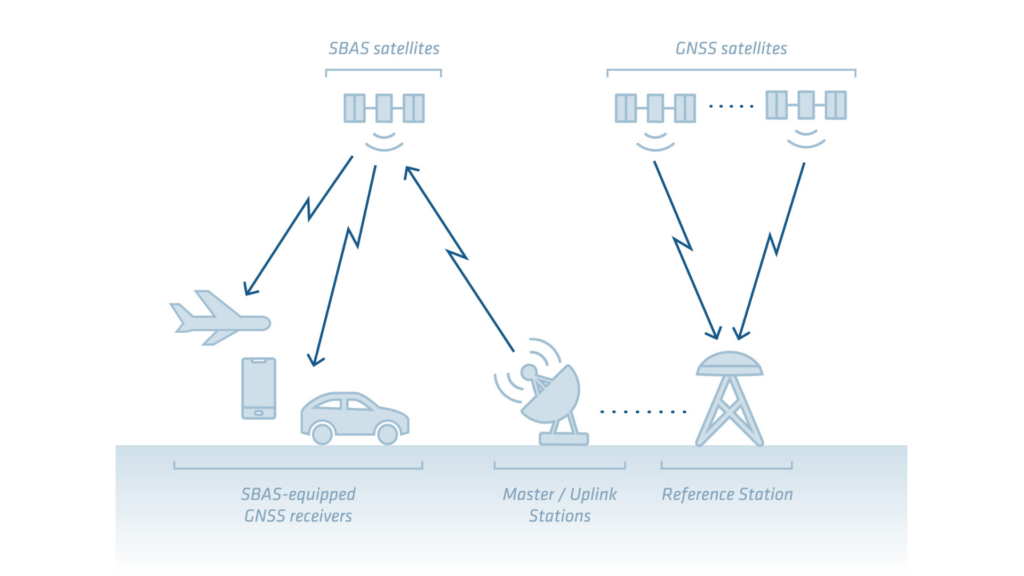
O conceito de SBAS é usar uma rede de estações de referência para calcular correções que podem melhorar o desempenho do GPS em uma ampla área (cobertura continental).
Essas correções são então transmitidas por satélites geoestacionários SBAS dedicados. Os receptores GNSS modernos podem rastrear essas correções diretamente através de sua antena GNSS regular e usá-las em seu mecanismo de posicionamento, como, SBAS que oferece uma precisão de 1 metro.
O principal objetivo de todas as constelações SBAS não é alcançar a máxima precisão, mas permitir que o GNSS alcance a precisão mínima para a aplicação pretendida (navegação e pouso de aeronaves) com um conceito adicional de integridade (medição precisa do erro de posição).
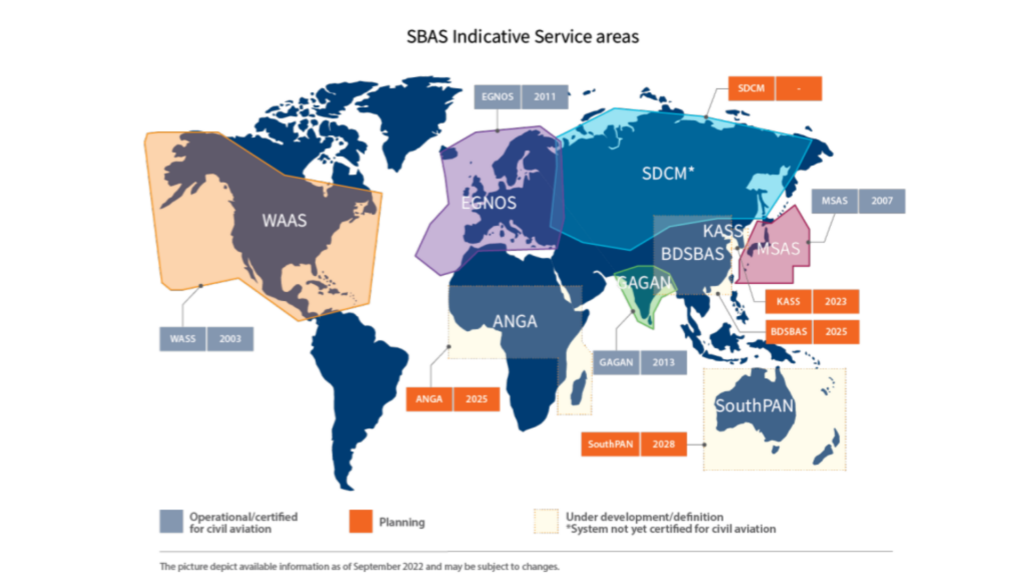
Os sistemas SBAS atualmente em uso incluem:
- WAAS para países da América do Norte
- EGNOS para a Europa
- GAGAN para a Índia
- MSAS para o Japão
No entanto, a maioria dos SBAS atuais fornece apenas correções para a constelação GPS, tornando-os subótimos para a navegação terrestre. As futuras soluções SBAS (por exemplo, EGNOS V2) fornecerão correções multi-constelação.
Tecnologia por trás do SBAS
As várias soluções SBAS usam a mesma tecnologia subjacente para fornecer correções. Eles fornecem correções para:
- Erros do relógio do satélite
- Desvios da órbita do satélite
- Erros atmosféricos
O SBAS também fornece informações de integridade dos satélites, que podem ser usadas para rejeitar dados de satélites com mau funcionamento.
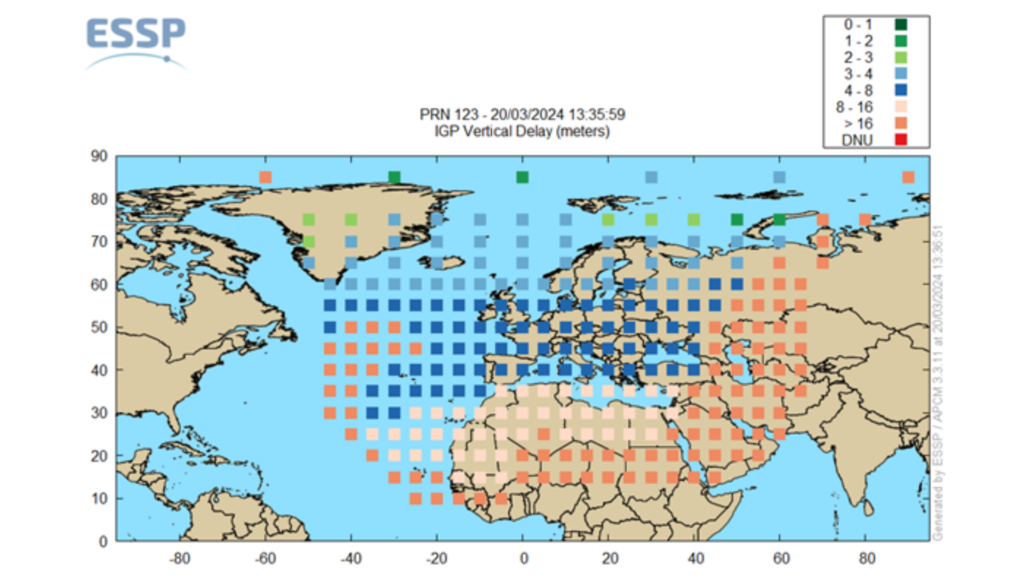
As correções atmosféricas também são computadas usando a rede de estações base para fornecer um padrão dos erros atmosféricos. O valor do erro transferido corresponde ao atraso vertical introduzido pela atmosfera em determinados pontos chamados IGP (Pontos de Grade Ionosférica). O receptor pode então corrigir o atraso para os diferentes sinais de cada satélite.
Usando as informações fornecidas pelo SBAS, o receptor pode corrigir erros na medição baseada em pseudorange, melhorando a precisão da posição para aproximadamente 1,2m RMS horizontal e 1,6m RMS vertical. Esta é uma melhoria significativa em relação ao GNSS autônomo, especialmente para o componente vertical.
Cinemático em Tempo Real (RTK) e Cinemático Pós-Processado (PPK)
A tecnologia RTK foi introduzida pela primeira vez para aplicações de levantamento em meados da década de 1990. Como o tradicional Differential Global Positioning System (DGPS), o RTK depende de uma estação base localizada com precisão e receptores GNSS móveis (rovers).
Duas etapas de computação importantes permitem um posicionamento preciso em nível de centímetro:
- Dupla diferença
- Medição da fase da portadora e fixação da ambiguidade
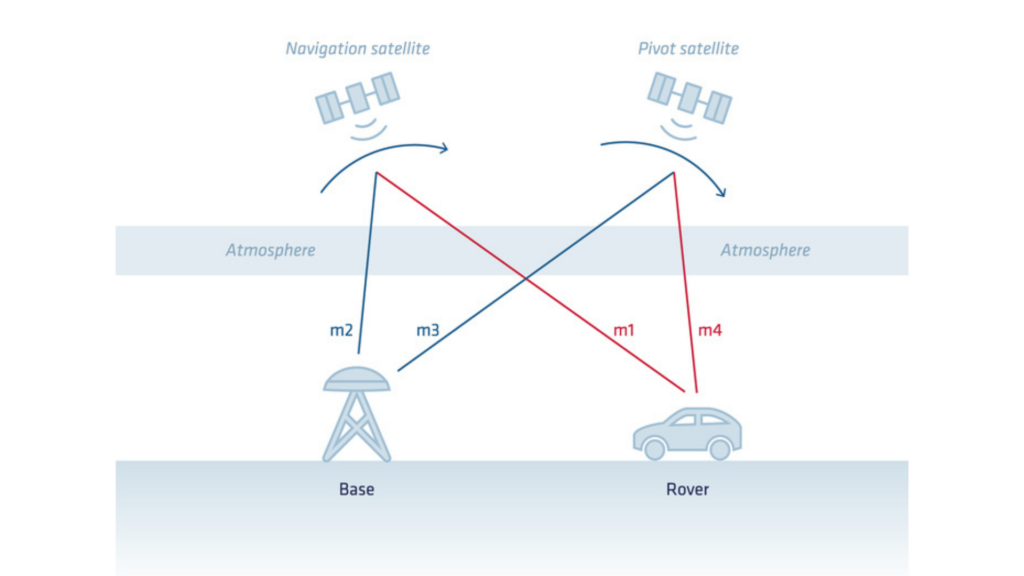
Dupla diferença
O DGPS geralmente usa apenas diferença simples e medições de código.
Por outro lado, o RTK adiciona medições de fase e usa uma abordagem de “diferença dupla”. Neste método, as medições da base são subtraídas das medições do rover, e todas as medições do satélite de navegação são subtraídas de um satélite pivô.
Esta abordagem pode compensar todos os erros induzidos por satélite, erros induzidos pelo receptor, bem como os erros atmosféricos que são considerados constantes nas proximidades da estação base.
A partir deste cálculo, obtemos:
- A posição do rover (latitude/longitude/altitude) no datum da estação base
- A hora do rover
A distância entre a estação base e o rover é chamada de linha de base e é um fator chave no RTK. À medida que a linha de base aumenta, o orçamento de erro aumenta marginalmente porque os erros atmosféricos comuns e os erros comuns da órbita do satélite não são completamente cancelados. Este é o típico “+1ppm” visto nas especificações de precisão da posição RTK.
Medição da fase da portadora e fixação da ambiguidade
A medição da fase da portadora, introduzida em nosso artigo anterior, é necessária para reduzir os erros ao nível do centímetro.
O desafio com as medições da fase da portadora é que elas são inerentemente ambíguas (ou incompletas). Há um número inteiro de ciclos da fase da portadora faltando na medição. Essa parte faltante também é conhecida como “ambiguidade”.
O processo de posicionamento Real-Time Kinematic (RTK) começa estimando essas ambiguidades. Esse processo também é conhecido como modo “RTK Float”. Nesse modo, as ambiguidades convergem lentamente, mas não são valores inteiros. Isso permite que o receptor suavize a posição e alcance uma precisão de aproximadamente nível de decímetro.
Para obter o máximo de precisão e robustez, a próxima etapa é identificar o valor inteiro para cada uma dessas ambiguidades em tempo real. Esse processo é chamado de resolução de ambiguidade inteira.
O resultado da resolução de ambiguidade maximiza a precisão do RTK e fornece maior robustez. Isso é comumente conhecido como modo “RTK Fixed”.
Se o rastreamento de fase para um determinado satélite for interrompido, ocorre um evento de ‘cycle slip’ e a ambiguidade inteira para esse satélite deve ser resolvida novamente. Por esse motivo, muitos cycle slips (e especialmente cycle slips em todos os satélites ao mesmo tempo) têm um efeito negativo no desempenho do RTK. Uma boa antena e posicionamento da antena e um ambiente de RF limpo são essenciais para limitar esses eventos.
Cinemática de Pós-processamento
Como vimos, o RTK é a aplicação dessas correções “em tempo real”, o que significa que o rover deve ter uma conexão de link de dados com a estação base para calcular o processamento RTK em campo.
Algumas aplicações não precisam da trajetória em tempo real, mas podem se beneficiar de uma maior precisão ou de uma configuração mais simples. O Post Processing Kinematic (PPK) pode atender a essas necessidades. Com o PPK, o rover coleta seus próprios dados GNSS brutos durante a coleta de dados sem receber correções em tempo real. Posteriormente, esses dados são pós-processados usando informações precisas de uma estação base ou de uma rede de estações de referência.
O PPK permite mais flexibilidade na coleta de dados porque não depende de correções em tempo real. É frequentemente usado em cenários onde a comunicação em tempo real é difícil ou desnecessária, como mapeamento aéreo, levantamento com drones ou pesquisa científica.
Vantagens de usar PPK para correções diferenciais.
O PPK oferece os seguintes benefícios principais ao processar GNSS:
- Fluxo de trabalho de campo aprimorado: Um custo importante de uma missão baseada em RTK é garantir que uma estação base esteja próxima, configurar uma estação base, se necessário, garantir uma conexão de dados confiável, etc. O Qinertia possui um grande número de redes CORS integradas; e acesso direto a redes de terceiros. Isso elimina a complexidade de garantir a disponibilidade de uma base e configurar uma conexão de dados confiável.
- Controle de qualidade aprimorado: Vários indicadores de qualidade ajudam a avaliar o desempenho real de um processamento. Estes incluem estatísticas avançadas, separação (diferença entre a posição/atitude calculada durante o processamento forward e backward), bem como indicadores de sinais GNSS.
- Desempenho geral aprimorado: a resolução de ambiguidade RTK pode levar algum tempo (de alguns segundos a alguns minutos, dependendo da distância até a estação base e das condições atmosféricas). Isso pode ser significativo no início de uma aquisição ou em condições GNSS desafiadoras. O PPK mitiga esses efeitos processando nas direções direta e inversa para maximizar a taxa de correção. O desempenho também pode ser melhorado usando algoritmos mais avançados ou usando efemérides de satélite precisas.