Acelerômetros e giroscópios de alta precisão
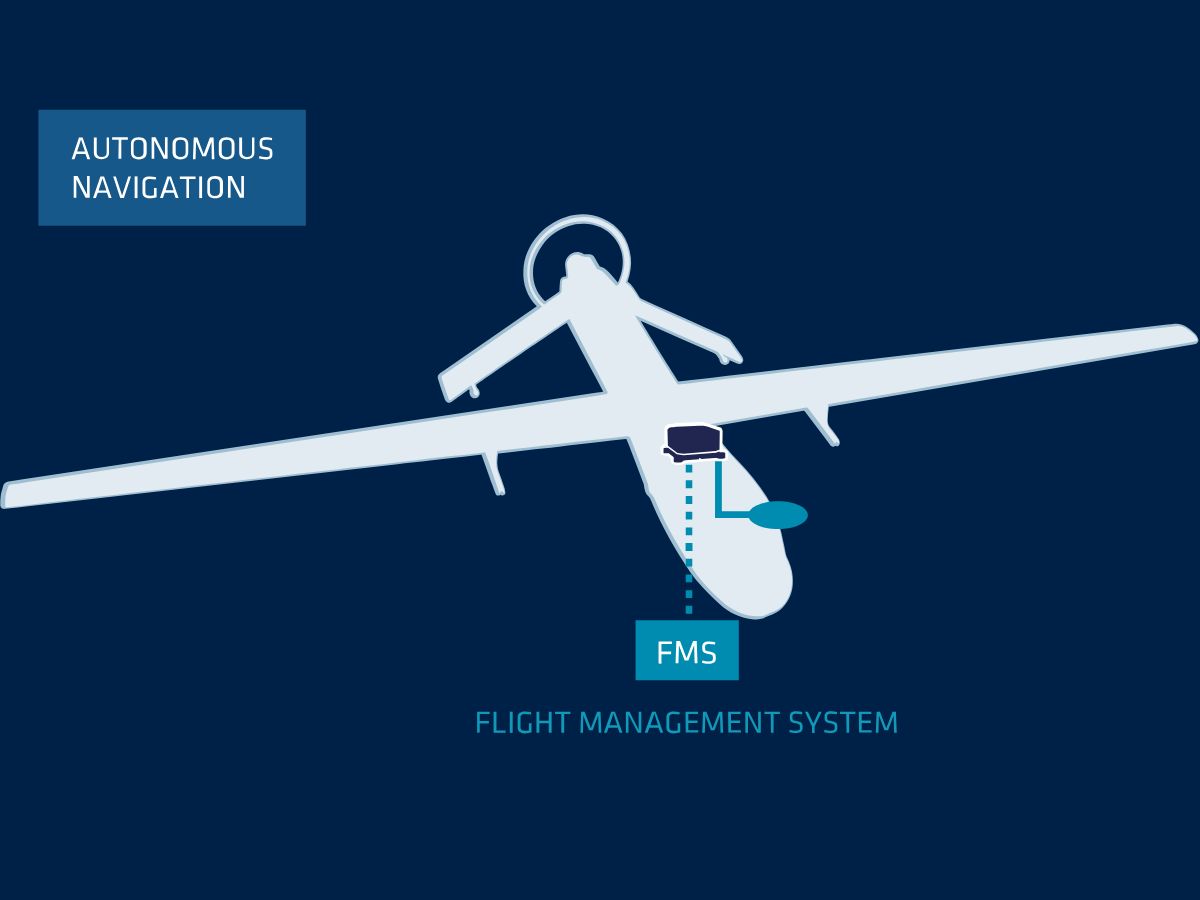
Os Sistemas Inerciais desempenham um papel crítico como auxílio de navegação primário e secundário em dispositivos e veículos de defesa (por exemplo, veículos aéreos não tripulados), trabalhando em conjunto com sistemas de bússola e mapas. Esses sistemas fornecem dados de navegação contínuos e em tempo real, essenciais para evitar colisões, planejar rotas e ter consciência situacional. Além disso, o INS aprimora a autonomia do veículo, permitindo que os veículos operem de forma mais independente no campo de batalha.
Nossos sistemas inerciais possuem acelerômetros e giroscópios de alta precisão, que são cruciais para garantir a precisão e a confiabilidade. Ao combinar dados desses sensores com informações de fontes externas, as soluções de INS de alta precisão podem detectar até mesmo as menores mudanças de movimento. Essa fusão de sensores permite que o INS forneça dados de navegação precisos e confiáveis, cruciais para aplicações de missão crítica.
Design robusto e com uso eficiente do espaço
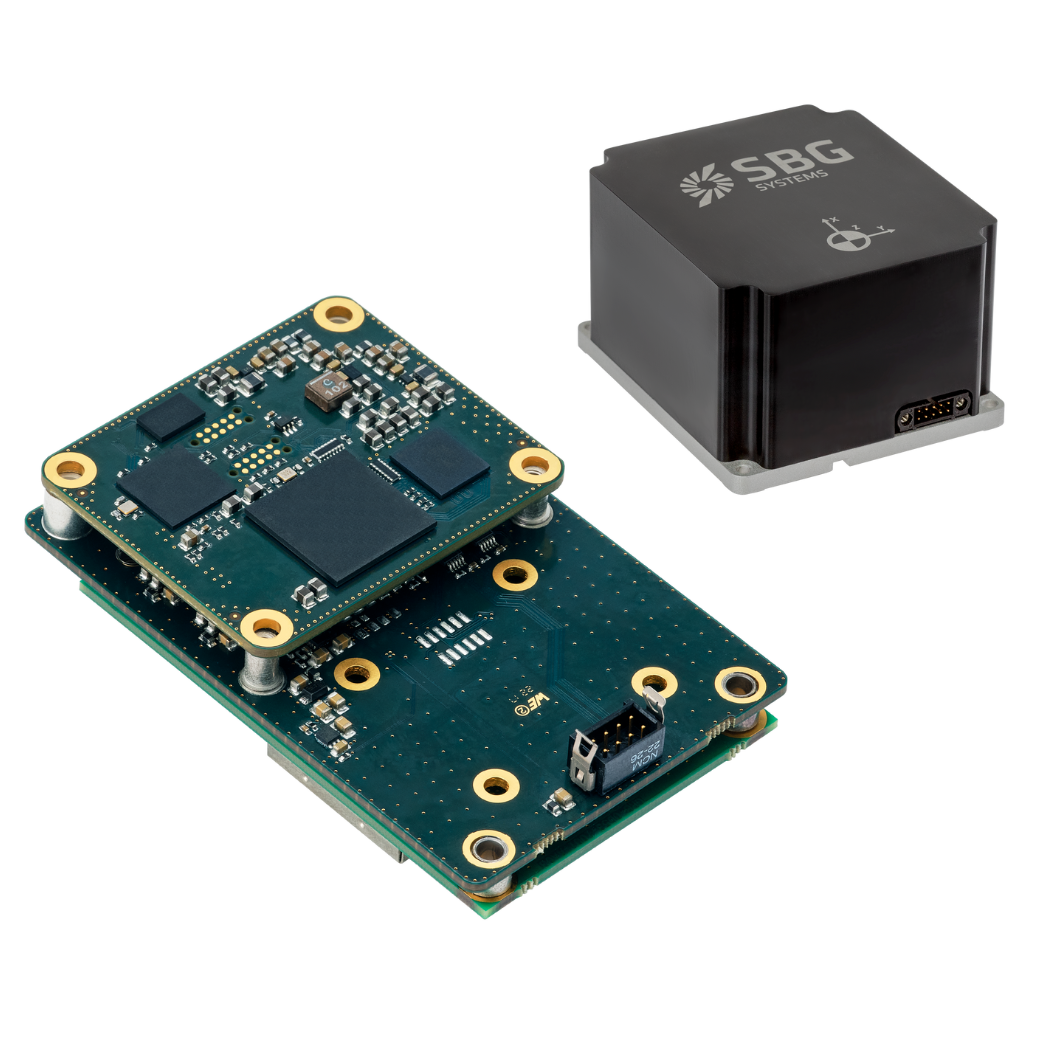
Nossos sistemas de navegação são unidades de medição inercial (IMU) baseadas em MEMS, comumente disponíveis na forma OEM. Usamos materiais e designs robustos o suficiente para suportar as condições extremas que os veículos militares enfrentam, como vibrações intensas, mudanças drásticas de temperatura e climas adversos. A confiabilidade nesses ambientes é crucial, pois a falha do sistema pode comprometer o sucesso da missão. Testados de acordo com os padrões militares, esses materiais garantem que os sistemas críticos continuem a funcionar de forma otimizada em cenários exigentes.
Durabilidade e resiliência são fundamentais para manter a eficácia operacional, tornando-os essenciais para aplicações de missão crítica, onde qualquer mau funcionamento pode ter sérias consequências.

Soluções OEM e completas fáceis de integrar
Nossos sensores inerciais são projetados para se integrar perfeitamente a todos os tipos de UAVs (veículos aéreos não tripulados). Esses fatores permitem que nosso INS seja facilmente instalado sem exigir modificações significativas.
Essa adaptabilidade garante uma implementação rápida e consistente, reduzindo o tempo de inatividade e os custos operacionais, mantendo a precisão da navegação. Com nossas soluções escaláveis, as forças de defesa podem garantir que toda a sua frota se beneficie dos recursos aprimorados de navegação do INS, apoiando operações de missão crítica sem interromper as configurações do UAV ou exigir adaptações complexas.

Soluções para navegação de UAV
Nossos sensores fornecem uma latência extremamente baixa entre o movimento e a saída. Eles são cuidadosamente projetados com condicionamento de sinal e filtragem FIR para fornecer alta largura de banda, protegendo a medição contra vibrações.

Pulse-40

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro

Quanta Plus
Quanta Extra
Brochura de aplicações de defesa
Receba nosso folheto diretamente na sua caixa de entrada!
Estudos de caso
Explore as histórias de sucesso por trás das soluções inerciais para UAV da SBG Systems. Descubra como nossos sistemas de navegação de ponta transformaram as operações de veículos aéreos não tripulados em vários setores, desde a agricultura de precisão até a defesa.
Cada estudo de caso destaca aplicações do mundo real onde nossos sensores inerciais avançados e a tecnologia GNSS forneceram precisão, confiabilidade e desempenho incomparáveis.



Eles falam sobre nós
Descubra como nossas soluções inerciais elevaram as operações de nossos clientes e aumentaram sua produtividade.
Descubra outras aplicações de defesa para veículos autônomos
Explore como os sistemas de navegação inercial aprimoram o desempenho de veículos autônomos em uma ampla gama de aplicações de defesa. Desde sistemas terrestres não tripulados até comboios autônomos e plataformas de reconhecimento, nossas soluções fornecem o posicionamento preciso, a orientação e a confiabilidade necessários para o sucesso da missão — mesmo em ambientes com GNSS negado.
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre a navegação de UAVs (veículos aéreos não tripulados). Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Quais tipos de integração de INS são possíveis em UAVs de defesa?
Nossas soluções são adequadas para integração com vários tipos de UAVs de defesa, oferecendo versatilidade e adaptabilidade para diferentes necessidades operacionais. Nossos sensores de movimento e navegação trazem detecção tática para seus sistemas sem comprometer o SWaP-C! Eles são particularmente adequados para uso por integradores.
Para UAVs que dependem de GNSS, nossos receptores GNSS de dupla antena oferecem precisão excepcional. Isso é benéfico para a navegação de superfície e auxilia na transição entre a navegação aérea e terrestre. Além disso, todos os sensores suportam vários protocolos de comunicação, como RS-232, CAN e Ethernet, permitindo uma integração perfeita com sistemas UAV.
Finalmente, é possível integrar soluções de posicionamento externas, como DVL ou outros auxílios de navegação, para fornecer dados precisos de roll, pitch, heading e altitude. Isso aprimora a navegação em ambientes onde os sinais de GNSS podem ser fracos ou indisponíveis.
Como garantimos os padrões de qualidade do sensor para aplicações militares UAV?
Na SBG Systems, garantir os mais altos padrões de qualidade para nossas unidades de medição inercial (IMUs) envolve um processo meticuloso. Começamos com a seleção ideal de componentes MEMS de alta qualidade, com foco em acelerômetros e giroscópios confiáveis que atendam aos nossos rigorosos requisitos de qualidade. Nossas IMUs são alojadas em invólucros robustos projetados para suportar vibrações e condições ambientais, garantindo durabilidade e desempenho.
Nosso processo de calibração automatizado envolve uma mesa de 2 eixos e aborda faixas de temperatura de -40°C a 85°C. Esta calibração compensa vários fatores, incluindo desvios, efeitos de eixo cruzado, desalinhamento, fatores de escala e não linearidades em acelerômetros e giroscópios, garantindo um desempenho consistente em todas as condições climáticas.
Nosso processo de qualificação envolve ainda uma triagem interna rigorosa para garantir que apenas os sensores que atendam às nossas especificações continuem durante a produção. Cada IMU é acompanhada por um relatório de calibração detalhado e tem garantia de dois anos. Esta abordagem rigorosa garante alta qualidade, confiabilidade e desempenho consistente ao longo do tempo, fornecendo IMUs superiores para defesa e outras aplicações críticas.
Também realizamos testes ambientais e de resistência completos para garantir a confiabilidade. Alguns de nossos sensores atendem a vários padrões MIL-STD, garantindo resistência a choques, vibração e condições extremas.
Como controlar os atrasos de saída em operações com UAVs?
Controlar os atrasos de saída nas operações de VANTs é essencial para garantir um desempenho responsivo, navegação precisa e comunicação eficaz, especialmente em aplicações de defesa ou de missão crítica.
A latência de saída é um aspecto importante em aplicações de controle em tempo real, onde uma latência de saída mais alta pode degradar o desempenho dos loops de controle. Nosso software embarcado INS foi projetado para minimizar a latência de saída: uma vez que os dados do sensor são amostrados, o Filtro de Kalman Estendido (EKF) executa cálculos pequenos e de tempo constante antes que as saídas sejam geradas. Normalmente, o atraso de saída observado é inferior a um milissegundo.
A latência de processamento deve ser adicionada à latência de transmissão de dados se você quiser obter o atraso total. Essa latência de transmissão varia de uma interface para outra. Por exemplo, uma mensagem de 50 bytes enviada em uma interface UART a 115200 bps levará 4 ms para a transmissão completa. Considere taxas de baud mais altas para minimizar a latência de saída.