Maior desempenho sob baixa dinâmica
Os sistemas de mapeamento móvel com IMUs integradas fornecem dados em tempo real, fornecendo insights críticos sobre a dinâmica ambiental.
Esses sistemas permitem a criação de mapas de alta definição (mapas HD) para veículos autônomos, aumentam a precisão e reduzem o risco de lacunas de dados, tornando-os essenciais para aplicações como mapeamento de infraestrutura, levantamentos rodoviários e análise ambiental.
Com a integração avançada de GNSS e inercial, os sistemas de mapeamento móvel oferecem configuração rápida e inicialização rápida, minimizando o tempo de inatividade e permitindo a coleta rápida de dados. Isso é particularmente valioso em cenários urgentes, como levantamentos móveis de infraestrutura ou mapeamento de resposta a emergências, onde a implantação rápida é crucial.
Em ambientes de baixa dinâmica, como veículos movendo-se lentamente em áreas urbanas ou internas, os sistemas inerciais de alto desempenho mantêm dados precisos de posicionamento e orientação. Embora os sistemas GPS tradicionais possam ter dificuldades em tais condições, um INS integrado com GNSS garante dados contínuos e confiáveis, mesmo em ambientes com restrição de GNSS.
Ao garantir um desempenho consistente, esses sistemas produzem modelos 3D precisos, mapas topográficos e produtos geoespaciais, independentemente da velocidade de movimento ou da complexidade ambiental.

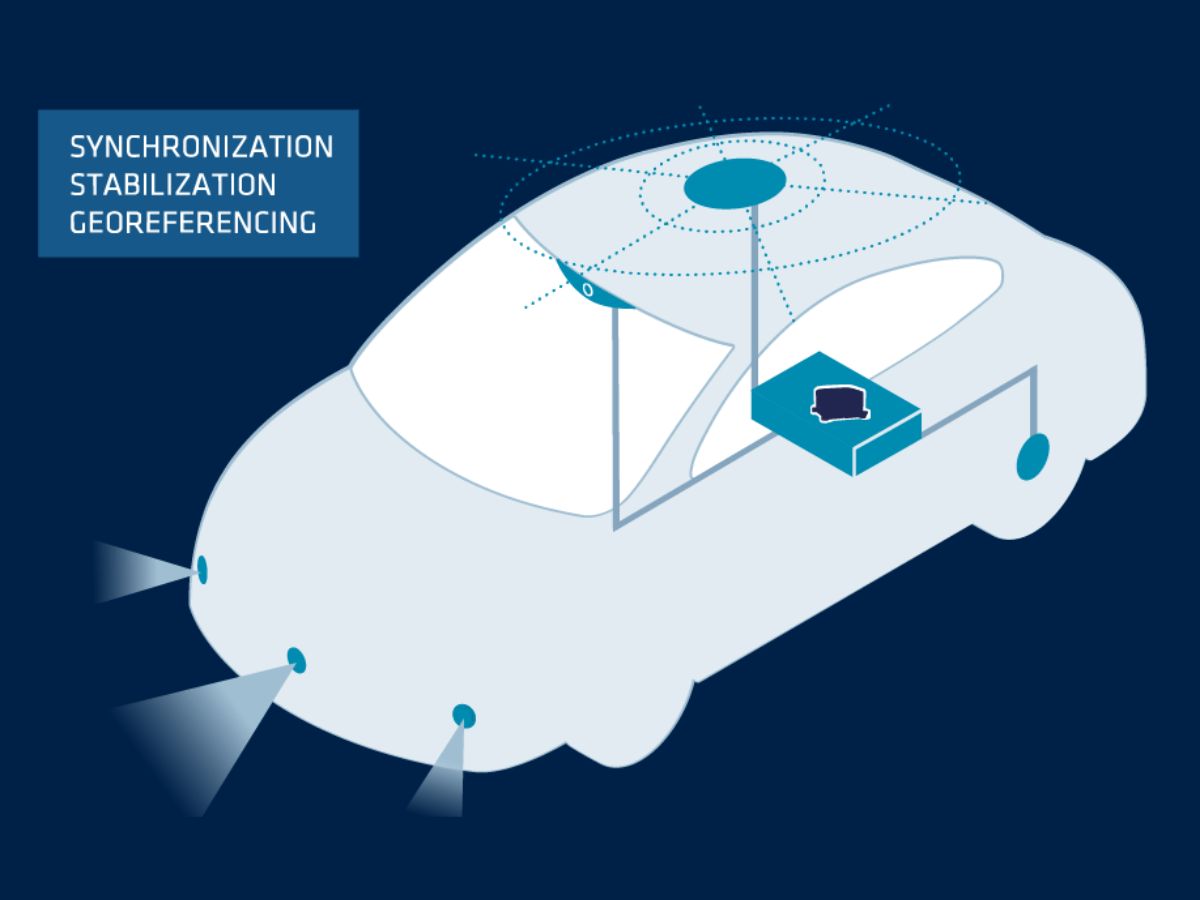
Interface de comunicação única com sincronização integrada
Nossos sistemas inerciais oferecem um processo de integração simplificado com uma única interface de comunicação. O INS pode servir como o hub central para dados de sensores GNSS e LiDAR. Ao utilizar protocolos de comunicação padrão da indústria, Ethernet ou barramento CAN, você pode fazer a interface do INS com seu receptor GNSS e sistema LiDAR móvel, minimizando a complexidade do hardware e evitando a necessidade de múltiplos links de comunicação.
Nossas soluções INS vêm com recursos de sincronização integrados que garantem a fusão perfeita de dados entre GNSS, LiDAR e dados inerciais.
O INS pode servir como o clock mestre PTP, sincronizando os timestamps de todos os sensores, o que é fundamental para operações SLAM. Com recursos de relógio em tempo real (RTC) e a capacidade de lidar com o tempo do GNSS e sinais de trigger externos, o INS garantirá que os dados do GNSS e do LiDAR estejam alinhados corretamente para um processamento SLAM preciso.
Capacidades de tempo real e pós-processamento
Os Sistemas de Mapeamento Móvel (MMS) oferecem recursos de tempo real e pós-processamento, permitindo que os usuários acessem dados imediatos e, ao mesmo tempo, refinem os resultados posteriormente para obter maior precisão.
A aquisição de dados em tempo real permite que engenheiros ou topógrafos façam avaliações no local, enquanto o software de pós-processamento garante que o resultado final seja o mais preciso possível. Os sistemas inerciais contribuem significativamente para este processo, mantendo dados posicionais consistentes e confiáveis, mesmo quando os sinais de satélite não estão disponíveis ou degradados.
As plataformas de mapeamento móvel equipadas com sistemas inerciais oferecem flexibilidade na coleta e análise de dados. Os operadores podem ajustar os parâmetros em tempo real, garantindo que seus projetos de mapeamento atendam aos padrões exigidos de precisão.
Para maior refinamento, oferecemos o Qinertia, um poderoso software de pós-processamento que melhora a precisão da trajetória, aprimorando os dados GNSS e INS posteriormente, o que pode complementar os fluxos de trabalho de mapeamento baseados em SLAM.

Nossas soluções para mapeamento móvel
Nossos sistemas de navegação inercial (INS) são projetados especificamente para os mercados de levantamento, oferecendo alto desempenho e facilidade de uso. Construídos com sensores inerciais avançados, eles integram algoritmos de ponta e tecnologia GNSS para fornecer dados precisos de navegação e posicionamento. Nossos sistemas são altamente adaptáveis, com componentes configuráveis para atender às necessidades específicas da aplicação.

Ekinox-D

Apogee-D

Navsight Land-Air
Brochura de aplicações de mapeamento
Receba nosso folheto diretamente na sua caixa de entrada!
Estudos de caso
A SBG Systems fez parceria com empresas líderes em vários setores para fornecer soluções inerciais de alto desempenho para mapeamento móvel. Nossos estudos de caso mostram as histórias de sucesso de projetos onde nossa tecnologia desempenhou um papel fundamental na aquisição e análise de dados.



Eles falam sobre nós
Ouça em primeira mão os inovadores e clientes que adotaram nossa tecnologia.
Seus depoimentos e histórias de sucesso ilustram o impacto significativo que nossos sensores têm em aplicações práticas de veículos autônomos.
Descubra mais aplicações de levantamento
A SBG Systems oferece sistemas de navegação inercial de alto desempenho e sensores de movimento que desempenham um papel fundamental no levantamento terrestre, marítimo e aéreo. Desde dragagem e mapeamento portuário, mapeamento interno até fotogrametria UAV, nossas soluções inerciais ajudam os profissionais de geotecnologias a coletar dados precisos de posição, orientação e movimento em todos os tipos de ambientes.
Explore nossas aplicações de levantamento.
Você tem perguntas?
Nossa seção de FAQ aborda as perguntas mais comuns sobre sistemas de mapeamento móvel, incluindo informações sobre as tecnologias envolvidas, melhores práticas e como integrar nossos produtos às suas soluções.
O que é SLAM?
SLAM, que significa Simultaneous Localization and Mapping (Localização e Mapeamento Simultâneos), é uma técnica computacional usada em robótica e visão computacional para construir um mapa de um ambiente desconhecido, enquanto rastreia simultaneamente a localização de um agente dentro desse ambiente. Isso é particularmente útil em cenários onde o GNSS não está disponível, como em ambientes internos ou em áreas urbanas densas.
Os sistemas SLAM determinam a posição e orientação do agente em tempo real. Isso envolve o rastreamento do movimento do robô ou dispositivo enquanto ele navega pelo ambiente. Enquanto o agente se move, o sistema SLAM cria um mapa do ambiente. Esta pode ser uma representação 2D ou 3D, capturando o layout, os obstáculos e as características do ambiente.
Esses sistemas frequentemente utilizam múltiplos sensores, como câmeras, LiDAR ou unidades de medição inercial (IMUs), para coletar dados sobre o ambiente. Esses dados são combinados para melhorar a precisão tanto da localização quanto do mapeamento.
Os algoritmos SLAM processam os dados recebidos para atualizar continuamente o mapa e a localização do agente. Isso envolve cálculos matemáticos complexos, incluindo técnicas de filtragem e otimização.
O que é Real Time Kinematic?
A Cinemática em Tempo Real (RTK) é uma técnica precisa de navegação por satélite usada para aumentar a precisão dos dados de posição derivados de medições do Sistema Global de Navegação por Satélite (GNSS). É amplamente empregada em aplicações como levantamento, agricultura e navegação de veículos autônomos.
Ao usar uma estação base que recebe sinais GNSS e calcula sua posição com alta precisão. Em seguida, transmite dados de correção para um ou mais receptores móveis (rovers) em tempo real. Os rovers usam esses dados para ajustar suas leituras GNSS, melhorando sua precisão posicional.
O RTK fornece precisão em nível de centímetro, corrigindo os sinais GNSS em tempo real. Isso é significativamente mais preciso do que o posicionamento GNSS padrão, que normalmente oferece precisão dentro de alguns metros.
Os dados de correção da estação base são enviados aos rovers por meio de vários métodos de comunicação, como rádio, redes celulares ou Internet. Essa comunicação em tempo real é crucial para manter a precisão durante as operações dinâmicas.
O que é Posicionamento Pontual Preciso?
O Posicionamento Pontual Preciso (PPP) é uma técnica de navegação por satélite que oferece posicionamento de alta precisão, corrigindo erros de sinal de satélite. Ao contrário dos métodos GNSS tradicionais, que geralmente dependem de estações de referência terrestres (como no RTK), o PPP utiliza dados globais de satélite e algoritmos avançados para fornecer informações de localização precisas.
O PPP funciona em qualquer lugar do mundo sem a necessidade de estações de referência locais. Isso o torna adequado para aplicações em ambientes remotos ou desafiadores, onde a infraestrutura terrestre é inexistente. Ao utilizar dados precisos de órbita e clock de satélite, juntamente com correções para efeitos atmosféricos e de multicaminhos, o PPP minimiza erros comuns de GNSS e pode alcançar precisão em nível de centímetro.
Embora o PPP possa ser usado para o posicionamento pós-processado, que envolve a análise dos dados coletados após o ocorrido, ele também pode fornecer soluções de posicionamento em tempo real. O PPP em tempo real (RTPPP) está cada vez mais disponível, permitindo que os usuários recebam correções e determinem sua posição em tempo real.
O que é um relógio de tempo real?
Um Relógio de Tempo Real (RTC) é um dispositivo eletrônico projetado para controlar a hora e a data atuais, mesmo quando desligado. Amplamente utilizado em aplicações que exigem cronometragem precisa, os RTCs desempenham várias funções importantes.
Primeiramente, eles mantêm uma contagem precisa de segundos, minutos, horas, dias, meses e anos, frequentemente incorporando cálculos de ano bissexto e dia da semana para precisão a longo prazo. Os RTCs operam com baixa energia e podem funcionar com bateria de reserva, permitindo que continuem a marcar o tempo durante interrupções. Eles também fornecem timestamps para entradas de dados e logs, garantindo documentação precisa.
Adicionalmente, os RTCs podem acionar operações programadas, permitindo que os sistemas saiam de estados de baixa energia ou executem tarefas em horários específicos. Eles desempenham um papel crucial na sincronização de vários dispositivos (por exemplo, GNSS/INS), garantindo que operem de forma coesa.
Os RTCs são parte integrante de vários dispositivos, desde computadores e equipamentos industriais até dispositivos IoT, aprimorando a funcionalidade e garantindo o gerenciamento confiável do tempo em diversas aplicações.