
Il sistema di coordinate NED (North-East-Down) funge da sistema di riferimento ampiamente utilizzato per la navigazione e le misurazioni inerziali.
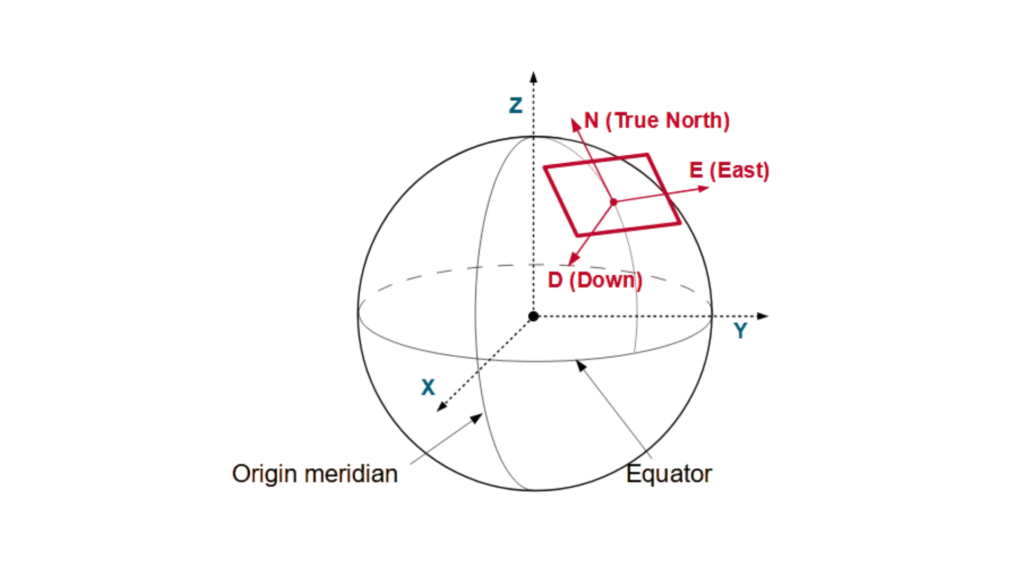
Il sistema North-East-Down (NED) funge da sistema di riferimento locale, definito dalle sue coordinate ECEF. In genere, rimane fisso al veicolo o alla piattaforma e si muove con il sistema di riferimento del corpo. Questo sistema posiziona gli assi Nord ed Est in un piano tangente alla superficie terrestre nella sua posizione attuale, in base al modello ellissoidale WGS84.
È costituito da tre assi ortogonali: l'asse Nord punta al Nord vero, l'asse Down si estende verso l'interno della Terra (opposto alla direzione Up locale) e l'asse Est completa il sistema destrorso puntando verso est (perpendicolare al Nord).
Allo stesso modo, un veicolo o una piattaforma può avere il sistema di riferimento East-North-Up (ENU) collegato localmente, che si muove con il sistema. A differenza del sistema di riferimento NED, il sistema ENU orienta i suoi assi in modo diverso: l'asse Nord punta ancora verso il Nord geografico, ma l'asse Up si estende verso l'esterno rispetto all'interno della Terra, mentre l'asse Est mantiene il suo allineamento del sistema destrorso puntando verso est.
Questo sistema di coordinate destrorso semplifica i calcoli per aeromobili, navi e veicoli autonomi allineandosi con le direzioni di movimento naturali.
Applicazioni che utilizzano il sistema NED
Un drone si affida a un sistema di autopilotaggio per calcolare la sua traiettoria all'interno del quadro di coordinate NED. Quando il drone è in volo verso Nord, la sua posizione aumenta in direzione Nord. Al contrario, quando il drone sale, il valore della sua coordinata Down diminuisce, dato che Down è positivo verso il basso.
Al contrario, il sistema di navigazione inerzialeINS di una nave funziona tracciando il suo movimento rispetto al quadro NED. Quando l'imbarcazione si muove verso est, la sua coordinata Est aumenta. Al contrario, quando la nave si immerge, la sua coordinata Down aumenta.
Un'auto a guida autonoma utilizza il quadro NED per accertare la propria posizione. La coordinata Nord del veicolo aumenta man mano che si sposta verso nord, mentre le asperità o gli avvallamenti del terreno causano cambiamenti nel valore Down.
Le munizioni a guida precisa si affidano al quadro NED per regolare la loro traiettoria. Quando un missile scende verso il bersaglio, la coordinata Down aumenta, garantendo un puntamento preciso.
Gli AUV(Autonomous Underwater Vehicles) utilizzano il quadro NED per navigare. Quando un AUV si muove in direzione nord-est, aumentano le coordinate Nord ed Est, mentre le variazioni di profondità influiscono sulla coordinata Down.
Il sistema NED è stato sviluppato per allineare i movimenti all'orientamento naturale della Terra, semplificando così la navigazione. Questo sistema viene utilizzato da ingegneri, piloti e scienziati per migliorare la precisione nelle applicazioni di posizionamento, guida e controllo.