
Un sistema di riferimento inerziale è un sistema di coordinate in cui gli oggetti seguono le leggi del moto di Newton senza la necessità di tenere conto di forze fittizie o esterne. In altre parole, è un sistema di riferimento non accelerato, sia a riposo che in movimento a velocità costante, in cui un corpo rimane a riposo o continua a muoversi di moto uniforme a meno che non sia soggetto a una forza esterna. Scienziati e ingegneri si affidano ai sistemi di riferimento inerziali per analizzare accuratamente il movimento nello spazio, nell'aviazione, nel settore marittimo e nei sistemi robotici.
Caratteristiche Definitive
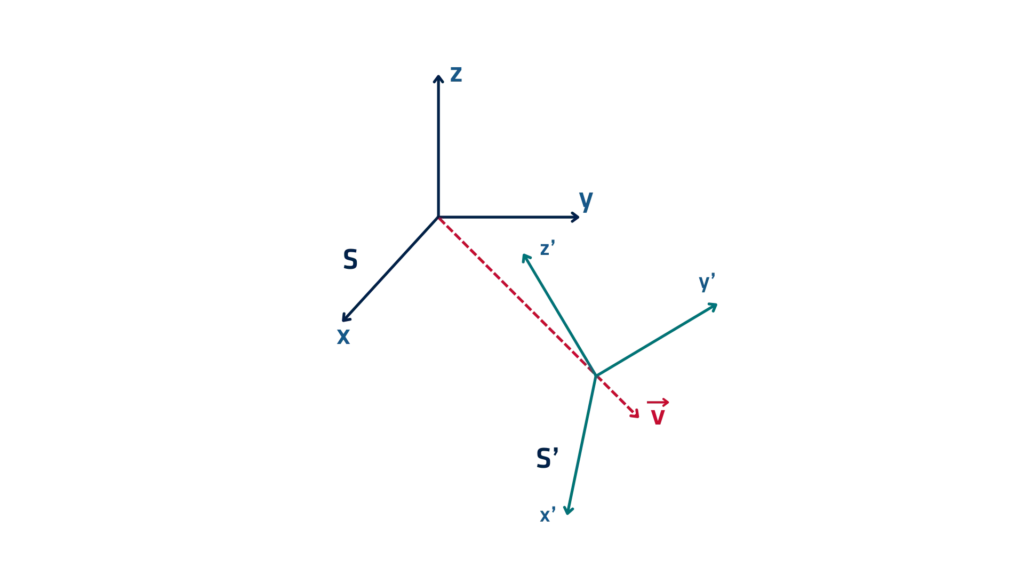
Un sistema di riferimento inerziale non accelera né ruota. Questa stabilità lo rende ideale per applicare la seconda legge di Newton, F = ma, senza introdurre forze di correzione come le forze di Coriolis o centrifughe. Ad esempio, lo spazio al di fuori dell'atmosfera terrestre può approssimare da vicino un sistema di riferimento inerziale perché vi è una minima perturbazione gravitazionale o influenza rotazionale. Questo lo rende perfetto per la dinamica dei veicoli spaziali e la modellazione del movimento dei satelliti.
Nelle missioni spaziali, gli ingegneri utilizzano un quadro di riferimento inerziale per calcolare le traiettorie dei veicoli spaziali. Quando un satellite viene lanciato, il controllo della missione ne definisce la posizione e la velocità iniziali in un quadro inerziale. Quando il satellite si muove, continua a seguire la traiettoria prevista, a meno che i propulsori non applichino una forza.
Un altro esempio è quello della navigazione aerea. Sebbene la superficie terrestre non sia un perfetto quadro inerziale a causa della sua rotazione, i sistemi di navigazione inerziale (INS) di alta precisione a bordo di jet e missili approssimano il movimento all'interno di un quadro inerziale per brevi periodi. Ciò consente a questi sistemi di fornire dati precisi su posizione e velocità senza GPS.
Durante la navigazione subacquea, i sottomarini operano spesso senza segnali esterni. Il loro INS stima la posizione in base a un'ipotesi di telaio inerziale, utilizzando accelerometri e giroscopi per tracciare il movimento nel tempo.
In robotica, gli ingegneri simulano il movimento dei robot utilizzando telai inerziali in ambienti virtuali. Ignorando l'attrito o le interferenze esterne, possono modellare con precisione e ottimizzare la pianificazione del percorso e gli algoritmi di controllo.
Limitazioni e correzioni
Sebbene sulla Terra non esistano veri e propri quadri di riferimento inerziali a causa della rotazione e della gravità, gli scienziati utilizzano quadri di riferimento pseudo-inerziali per scopi pratici. Applicano correzioni utilizzando dati di riferimento (ad esempio, GNSS o inseguitori stellari) per mantenere l'accuratezza nelle misurazioni a lungo termine.
I quadri di riferimento inerziali sono fondamentali per comprendere e prevedere il movimento. Assumendo un ambiente stabile e privo di forze, gli ingegneri possono progettare sistemi di navigazione, traiettorie di volo e controlli robotici affidabili in varie applicazioni avanzate.