
Il sistema di coordinate del sensore o sistema di riferimento del corpo è un sistema di riferimento locale che si muove con un sensore o una piattaforma, come un drone, un veicolo, un robot o un missile. Definisce l'orientamento e il movimento rispetto alla struttura fisica del sensore. Gli ingegneri utilizzano il sistema di riferimento del corpo per esprimere misurazioni come l'accelerazione, la velocità angolare e la velocità direttamente dalla prospettiva del sensore.
Il quadro di coordinate del sensore (corpo), spesso chiamato quadro del corpo o quadro del veicolo, serve come quadro di riferimento fissato a una piattaforma in movimento, come un drone, un'automobile, un missile o un veicolo subacqueo. Gli ingegneri utilizzano questo frame per descrivere il movimento e l'orientamento della piattaforma rispetto a se stessa, rendendolo essenziale per la navigazione, il controllo e la fusione dei sensori.
Nella maggior parte delle applicazioni, gli utenti montano sensori quali IMU, ricevitori GNSS o AHRS o unità AHRS direttamente sul veicolo. Questi sensori riportano i dati nel proprio quadro di coordinate, che di solito coincide con il quadro del corpo. È costituito da tre assi ortogonali che formano un sistema di coordinate destrorse:
- L'asse X punta in avanti, nella direzione del movimento o del muso del sensore.
- L'asse Y punta a destra (tribordo per i sistemi marini o aeronautici).
- L'asse Z punta verso il basso o verso il basso rispetto alla base del sensore, a seconda dell'applicazione.
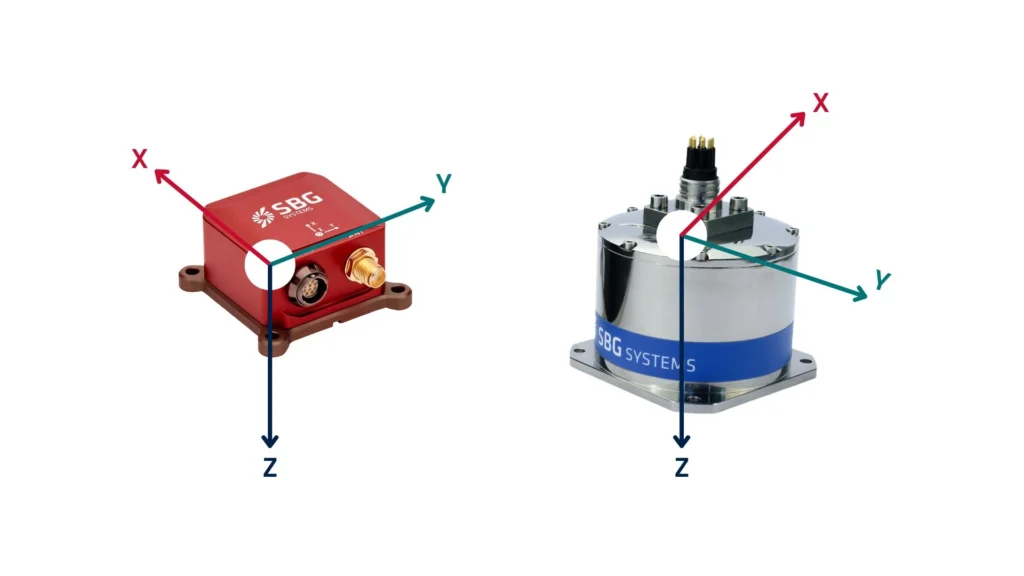
Questo orientamento fisso consente al sistema di misurare come si muove o ruota nel proprio spazio, piuttosto che rispetto alla Terra.
Esempi di applicazioni di telaio
L'IMU di un drone è responsabile della misurazione dell'accelerazione e della rotazione nel proprio quadro di riferimento. Quando il drone si muove in avanti, rileva la velocità angolare attorno al suo asse Y. Il sistema trasmette questi dati al controllore di volo, consentendo al drone di stabilizzarsi e di eseguire i comandi di volo con precisione. Ad esempio, il sistema di autopilotaggio del drone utilizza i dati dei sensori nel telaio del corpo per stabilizzare il volo ed eseguire manovre come l'imbardata, il beccheggio e il rollio. Il sistema interpreta i movimenti direttamente, esprimendoli come movimenti in avanti, laterali e verticali rispetto al telaio del drone stesso.
Un'auto a guida autonoma, invece, rileva la propria accelerazione lineare lungo gli assi X (in avanti), Y (lateralmente) e Z (verticalmente) del telaio. Questa capacità consente al veicolo di regolare la velocità, mantenere il controllo della corsia e rispondere ai cambiamenti del terreno. Questo quadro di coordinate facilita l'interpretazione dei dati lidar, radar e inerziali. Il sistema di controllo dell'auto utilizza questi dati per prendere decisioni di guida in tempo reale in base al proprio orientamento.
Il sistema di navigazione di un missile utilizza il telaio del corpo per tracciare l'orientamento. Durante le manovre, il sensore di bordo rileva i tassi di rotazione e l'accelerazione sugli assi fissi del corpo, consentendo correzioni di rotta precise. Il sistema di navigazione di bordo del missile utilizza il telaio del corpo per tracciare l'accelerazione e la velocità angolare, consentendogli di regolare la traiettoria e l'orientamento in base alla posizione corrente e all'orientamento del telaio delle coordinate.
Un braccio robotico utilizza un telaio del corpo per calcolare i movimenti delle articolazioni e le posizioni dei terminali. La posizione e l'orientamento di ciascun motore sono misurati in questo frame locale per garantire il controllo in tempo reale.
Difficoltà di allineamento dei sensori
Nelle applicazioni pratiche, i sensori non sono sempre perfettamente allineati con il frame del corpo. Per risolvere questo problema, gli ingegneri implementano frequentemente correzioni di rotazione del frame, che allineano il sistema di coordinate del sensore con il frame del corpo del veicolo. Ciò garantisce letture precise per i calcoli relativi a posizione, velocità e orientamento. È fondamentale per qualsiasi sistema che si muova e percepisca il suo ambiente. Svolge un ruolo vitale nella navigazione, nel controllo e nella stabilizzazione in tempo reale, rendendolo essenziale nei sistemi aerospaziali, di difesa, automobilistici e robotici.
Ci parli del suo progetto