Continuità di navigazione durante le interruzioni GNSS
Le nostre soluzioni di navigazione offrono numerosi vantaggi ai veicoli terrestri senza equipaggio (UGV), soprattutto in ambienti difficili dove altre tecnologie di navigazione possono fallire.
I vostri UGV possono ora operare efficacemente in ambienti in cui i segnali GNSS non sono disponibili, non sono affidabili o sono intenzionalmente disturbati (ad esempio, canyon urbani, tunnel sotterranei o campi di battaglia contesi). Questo è fondamentale per le missioni di soccorso e di difesa, dove le interferenze GNSS possono compromettere l'accuratezza della navigazione dell'UGV.
Grazie alla nostra gamma di soluzioni di navigazione, è possibile ottenere dati di navigazione ininterrotti senza affidarsi a riferimenti esterni come il GNSS. Ciò consente al vostro UGV di mantenere la consapevolezza della situazione e l'autonomia anche quando le comunicazioni o i segnali esterni sono persi.

Elevata precisione in ambienti dinamici
I nostri sistemi di navigazione raccolgono costantemente dati in tempo reale sulla posizione, la velocità e l'orientamento del veicolo (rollio, beccheggio, imbardata), consentendo un controllo preciso anche in ambienti altamente dinamici, come terreni accidentati o condizioni fuoristrada.
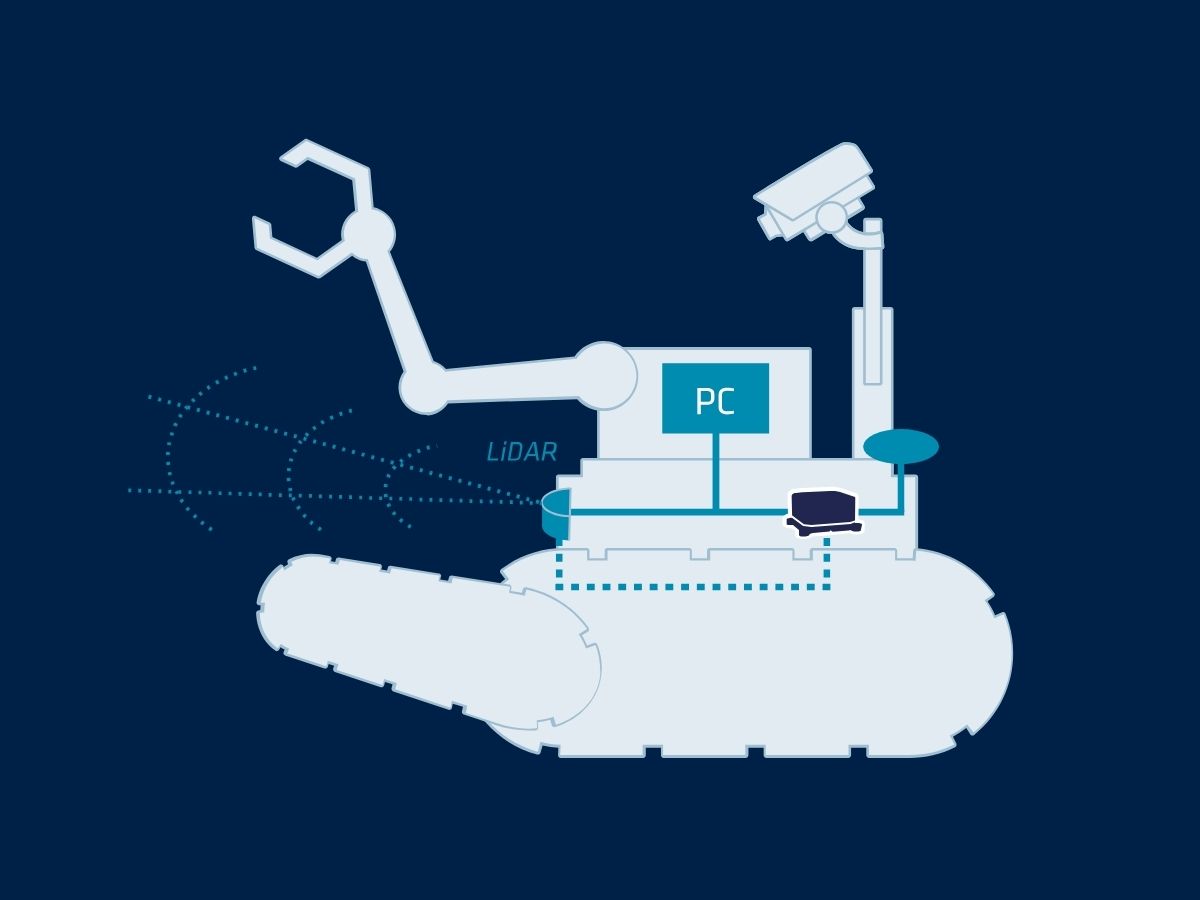
La precisione dei nostri sensori garantisce prestazioni affidabili in ambienti complessi e in rapida evoluzione. Per aumentare i dati di localizzazione del veicolo, è possibile integrare il nostro INS con altri sensori di bordo come telecamere, LiDAR e odometria per formare un sistema di navigazione multisensore. Questa fusione di sensori migliora l'accuratezza complessiva della localizzazione e la consapevolezza della situazione.
Inoltre, offrono dati di navigazione altamente affidabili, riducendo le possibilità di collisione o di fallimento della missione. Questo aspetto è particolarmente importante nelle operazioni militari o in ambienti pericolosi, dove la sicurezza è fondamentale.
Affidabilità in condizioni estreme
Un veicolo terrestre autonomo opera spesso in ambienti estremi (come deserti, foreste o zone disastrate) dove fattori ambientali come polvere, condizioni meteorologiche o interferenze elettromagnetiche possono influenzare altri sistemi di navigazione.
Le nostre soluzioni sono altamente resistenti a tali condizioni, garantendo prestazioni robuste. Fornendo dati di orientamento e posizionamento estremamente accurati, i nostri sensori migliorano la capacità di un UGV di pianificare e seguire autonomamente percorsi complessi, riducendo al minimo l'intervento umano.
Questa capacità migliora l'efficienza operativa nella difesa, nella logistica e nelle applicazioni industriali.

Selezione di prodotti
Le nostre soluzioni si integrano perfettamente con piattaforme UGV per offrire prestazioni affidabili anche nelle condizioni più difficili.

Pulse

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Volantino sulle applicazioni per la difesa
Riceva la nostra brochure direttamente nella sua casella di posta!
Casi di studio
Esplorate le storie di successo delle nostre soluzioni inerziali per UGV. Scoprite l'impatto significativo dei nostri sistemi di navigazione avanzati sulle operazioni degli UGV in diversi settori.
Attraverso ogni caso di studio, esaminiamo esempi tangibili che rivelano come i nostri sensori inerziali avanzati e la tecnologia GNSS abbiano costantemente fornito precisione, affidabilità e prestazioni ineguagliabili in situazioni pratiche. Scoprite in dettaglio e con esempi pratici come le nostre soluzioni affrontano sfide complesse e favoriscono l'eccellenza operativa.
Approfondite i nostri casi di studio per scoprire come le nostre soluzioni inerziali possono migliorare i vostri progetti e ottenere risultati eccezionali.


Parlano di noi
Ascolta in prima persona gli innovatori e i clienti che hanno adottato la nostra tecnologia.
Le loro testimonianze e storie di successo illustrano il notevole impatto che i nostri sensori hanno nelle applicazioni pratiche di navigazione UGV.
Scopri altre applicazioni per sistemi senza equipaggio
Esplora le diverse applicazioni dei sistemi inerziali in piattaforme senza equipaggio via terra, via mare e via aria. Dai veicoli terrestri autonomi e UAV ai droni sottomarini e alle imbarcazioni di superficie, le nostre tecnologie garantiscono navigazione, stabilità e controllo precisi anche negli ambienti più difficili.
Ha delle domande?
Che cos'è il GNSS rispetto al GPS?
GNSS sta per Global Navigation Satellite System (sistema globale di navigazione satellitare) e GPS per Global Positioning System (sistema di posizionamento globale). Questi termini sono spesso usati in modo intercambiabile, ma si riferiscono a concetti diversi nell'ambito dei sistemi di navigazione satellitare.
GNSS è un termine collettivo per tutti i sistemi di navigazione satellitare, mentre GPS si riferisce specificamente al sistema statunitense. Include più sistemi che forniscono una copertura globale più completa, mentre il GPS è solo uno di questi sistemi.
Con il GNSS si ottiene una maggiore precisione e affidabilità, grazie all'integrazione dei dati provenienti da più sistemi, mentre il GPS da solo potrebbe avere dei limiti a seconda della disponibilità dei satelliti e delle condizioni ambientali.
Cosa sono il jamming e lo spoofing?
Il jamming e lo spoofing sono due tipi di interferenze che possono compromettere in modo significativo l'affidabilità e l'accuratezza dei sistemi di navigazione satellitare come GNSS.
Per jamming si intende l'interruzione intenzionale dei segnali satellitari mediante la trasmissione di segnali di interferenza sulle stesse frequenze utilizzate dai sistemi GNSS . Questa interferenza può sopraffare o annegare i segnali satellitari legittimi, rendendo i ricevitori GNSS incapaci di elaborare accuratamente le informazioni. Il jamming è comunemente usato nelle operazioni militari per interrompere le capacità di navigazione degli avversari, ma può anche colpire i sistemi civili, causando guasti alla navigazione e problemi operativi.
Lo spoofing, invece, consiste nella trasmissione di segnali contraffatti che imitano i segnali GNSS autentici. Questi segnali ingannevoli possono indurre i ricevitori GNSS a calcolare posizioni o tempi errati. Lo spoofing può essere usato per sviare o disinformare i sistemi di navigazione, facendo potenzialmente deviare veicoli o aerei dalla rotta o fornendo dati di localizzazione falsi. A differenza del jamming, che si limita a ostacolare la ricezione del segnale, lo spoofing inganna attivamente il ricevitore presentando informazioni false come legittime.
Sia il jamming che lo spoofing rappresentano minacce significative all'integrità dei sistemi GNSS, rendendo necessarie contromisure avanzate e tecnologie di navigazione resilienti per garantire un funzionamento affidabile in ambienti contestati o difficili.