
El sistema de coordenadas NED (Norte-Este-Abajo) sirve como un sistema de referencia ampliamente utilizado para la navegación y las mediciones inerciales.
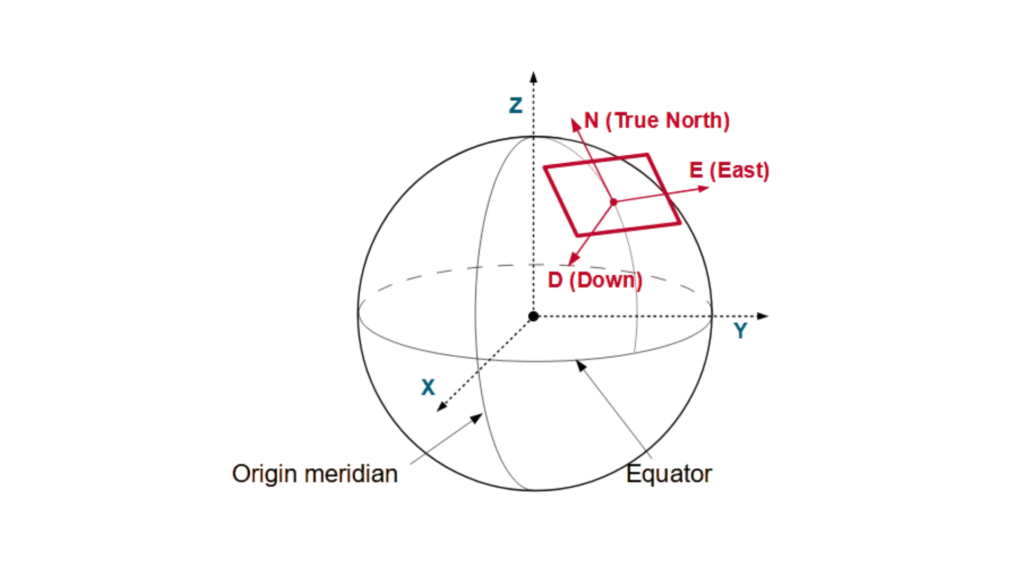
El sistema Norte-Este-Abajo (NED) sirve como un sistema de referencia local, definido por sus coordenadas ECEF. Normalmente, permanece fijo al vehículo o plataforma y se mueve con el sistema de referencia del cuerpo. Este sistema sitúa los ejes Norte y Este en un plano tangente a la superficie de la Tierra en su ubicación actual, basándose en el modelo de elipsoide WGS84.
Consta de tres ejes ortogonales: el eje Norte apunta al Norte Verdadero, el eje Abajo se extiende hacia el interior de la Tierra (opuesto a la dirección local Arriba), y el eje Este completa el sistema de la mano derecha apuntando al este (perpendicular al Norte).
Del mismo modo, un vehículo o plataforma puede tener el sistema Este-Norte-Arriba (ENU) conectado localmente, moviéndose con el sistema. A diferencia del sistema NED, el sistema ENU orienta sus ejes de forma diferente: el eje Norte sigue apuntando al Norte Verdadero, pero el eje Arriba se extiende alejándose del interior de la Tierra, mientras que el eje Este mantiene su alineación del sistema de la mano derecha apuntando al este.
Este sistema de coordenadas de la mano derecha simplifica los cálculos para aeronaves, embarcaciones marinas y vehículos autónomos al alinearse con las direcciones de movimiento naturales.
Las aplicaciones NED utilizan
Un dron se basa en un sistema de piloto automático para calcular su trayectoria dentro del marco de coordenadas NED. Cuando el dron está en un vuelo hacia el norte, su posición aumenta en la dirección Norte. Por el contrario, cuando el dron asciende, el valor de su coordenada Abajo disminuye, dado que Abajo es positivo hacia abajo.
Por el contrario, el INS (Sistema de Navegación Inercial) de un barco funciona rastreando su movimiento en relación con el marco NED. A medida que la embarcación se mueve hacia el este, su coordenada Este aumenta. Por el contrario, cuando la embarcación se sumerge, su coordenada Abajo aumenta.
Un coche autónomo utiliza el marco NED para determinar su posición. La coordenada Norte del vehículo aumenta a medida que se mueve hacia el norte, mientras que los baches o las depresiones del terreno provocan cambios en el valor de Abajo.
Las municiones guiadas con precisión se basan en el marco NED para ajustar su trayectoria. A medida que un misil desciende hacia su objetivo, la coordenada Abajo aumenta, lo que garantiza una puntería precisa.
Los AUV (Vehículos Submarinos Autónomos) utilizan el marco NED para navegar. Cuando un AUV se mueve en dirección noreste, tanto las coordenadas Norte como Este aumentan, mientras que los cambios de profundidad afectan a la coordenada Abajo.
El sistema NED se ha desarrollado para alinear los movimientos con la orientación natural de la Tierra, simplificando así la navegación. Este sistema es utilizado por ingenieros, pilotos y científicos para mejorar la precisión en aplicaciones de posicionamiento, guía y control.